I ricercatori hanno realizzato un robot chiamato Morphobot, stampato in 3D, capace di muoversi sia a terra che in aria, superando anche terreni accidentati. Questo robot, noto come Multi-Modal Mobility Morphobot (M4), è in grado di trasformare le sue appendici per svolgere diverse funzioni, come ruotare, camminare o propellersi. Grazie alla sua straordinaria versatilità, M4 è in grado di muoversi in vari ambienti e svolgere compiti altrimenti difficili per i robot tradizionali.
L’M4 può adattarsi a molteplici situazioni, rendendolo utile in svariati contesti, tra cui ricerca e salvataggio, esplorazione spaziale, gestione automatizzata dei pacchi e agricoltura digitale. I ricercatori ritengono che M4 potrebbe essere di grande aiuto in scenari di disastro, poiché la sua versatilità gli permette di adeguarsi a diverse esigenze.
Lo sviluppo di M4 rappresenta un passo significativo nell’ambito della robotica stampata in 3D. Sfruttando la potenza di questa tecnologia, i ricercatori hanno creato un robot estremamente versatile e adattabile. M4 dimostra che la stampa 3D ha il potenziale per spingere i limiti della robotica, aprendo nuove possibilità e sfide.
Il Multi-Modal Mobility Morphobot (M4) con riassegnazione degli appendici per migliorare la plasticità della locomozione
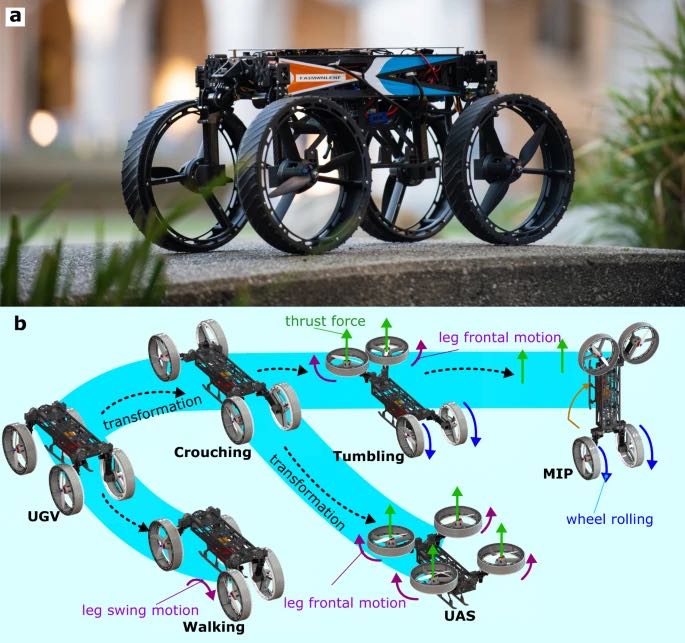
Questo studio si propone di progettare un robot in grado di spostarsi in ambienti non strutturati e su più substrati, sfruttando la plasticità della locomozione attraverso la trasformazione delle sue appendici multiuso per ottenere diverse funzioni, come ruote, zampe e propulsori. Il robot è chiamato M4, che sta per Multi-Modal Mobility Morphobot (Figura 1). Questo morphobot potrebbe essere utilizzato in diverse applicazioni, tra cui operazioni di ricerca e soccorso, esplorazione spaziale, movimentazione automatizzata di pacchi in spazi residenziali e agricoltura digitale, per citarne alcune.
Un esempio di utilizzo potrebbe essere nelle operazioni di ricerca e soccorso dopo catastrofi naturali come terremoti, inondazioni o tempeste (Figura 2). In tali situazioni, M4 può sfruttare la sua versatilità per adattarsi a diverse esigenze di missione. Ad esempio, quando la locomozione terrestre non è fattibile, M4 può svolgere un ruolo di sorveglianza strategica fornendo informazioni attraverso il sorvolo aereo con una serie di sensori integrati. Inoltre, M4 può utilizzare diverse forme di locomozione a terra, come rotolamento a quattro ruote, accovacciamento, camminata a quattro zampe o rotolamento a due ruote, per muoversi all’interno di edifici crollati o in spazi ristretti.
Questo studio presenta il design e il controllo del versatile robot multi-modale M4. Le sue caratteristiche principali sono una notevole diversità di modalità di locomozione, la capacità di operare in modo autonomo e una progettazione scalabile che consente operazioni multi-modali completamente autonome. Il robot è in grado di eseguire manovre innovative, come rotolare sopra ostacoli di grandi dimensioni e superare rampe ripide. Il suo design mira a fornire una soluzione scalabile con ampia plasticità della locomozione per sostenere le diverse situazioni di utilizzo.
Maggiori dettagli sul robot sono nel documento ” Morphobot di mobilità multimodale (M4) con appendice riproposta per il miglioramento della plasticità della locomozione” stato pubblicato. A questo indirizzo https://www.nature.com/articles/s41467-023-39018-y