Produzione di robotica al livello successivo con la robotica morbida stampata in 4D
Gli autori Ali Zolfagharian, Akif Kaynak e Abbas Kouzani esplorano la crescente scienza della robotica leggera, delineando le loro scoperte nei ” robot soft stampati in 4D a circuito chiuso di recente pubblicazione” . Sottolineando la velocità con cui questo campo sta crescendo, gli autori chiariscono che sono coinvolti molti diversi livelli di ricerca e sviluppo, dai materiali e la modellazione al controllo delle prestazioni e altro ancora. La stampa 3D consente una grande personalizzazione, ma portando il processo alla dimensione successiva con la stampa 4D, i ricercatori possono aggiungere funzionalità molto maggiori alla robotica.
La stampa 4D a circuito chiuso consente ai ricercatori di migliorare i robot soft con sensori, attuatori e controlli per migliorare le prestazioni complessive. Gli autori hanno integrato tali dettagli nelle loro innovazioni elettroniche qui, usando un modello di apprendimento automatico basato sui dati destinato a gestire una nuova gerarchia di attività per includere:
avido
Ordinamento
Arrampicare o gattonare
Ispezione
Cerca e salva
Sistemi di consegna di droga
“I robot morbidi simili a origami possono fornire rigidità variabile con maggiore efficienza e destrezza richieste in compiti specifici, che i robot convenzionali non sono in grado di gestire”, hanno affermato i ricercatori. “I robot morbidi stampati in loop 4D possono essere utilizzati anche in interventi chirurgici autonomi, laparoscopia ed endoscopia.”
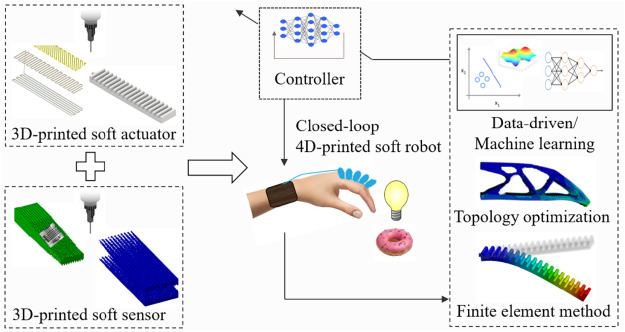
Schema del robot morbido stampato in 4D ad anello chiuso.
L’apprendimento automatico svolge un ruolo ovvio e sostanziale nei robot soft stampati in 4D, alleviando alcune delle sfide legate ai “diversi compiti di manipolazione”. L’apprendimento automatico può essere utilizzato per sviluppare tale robotica durante il processo di produzione e gli algoritmi possono accelerare l’ottimizzazione delle proprietà come la viscosità e l’orientamento delle parti.
“Attraverso l’integrazione di modelli fisici, ML utilizza insiemi di dati sparsi in un quadro di apprendimento statistico per prevedere materiali e parametri di elaborazione della stampa 3D per aumentare la velocità e la fedeltà della stampa 3D”, hanno affermato i ricercatori.
Con la stampa 3D, è possibile introdurre le seguenti funzioni:
Anisotropia mirata
Rigidità variabile
Resistenze meccaniche spazialmente eterogenee
L’uso dell’apprendimento automatico è vantaggioso per quest’area della robotica, offrendo dimensioni maggiori e altro, con una varietà di meccanismi di controllo disponibili: controller a circuito aperto, circuito chiuso (con sensori software integrati) e altro ancora.
“I meccanismi e i materiali utilizzati nella costruzione di robot morbidi sono simili; quindi, il controllo può essere ispirato da una strategia di apprendimento che si occupa di elevata non linearità e agilità ”, spiegano i ricercatori.
Solo i soli sensori stampati in 3D sono ora abbastanza avanzati per essere stampati a livello spaziale e con la robotica stampata in 4D, tali caratteristiche possono essere “classificate e introdotte”. Vi è anche la possibilità per il potenziale di robot soft anfibi in grado di svolgere una vasta gamma di attività.
“Nonostante i problemi esistenti, i robot soft stampati in 4D sono raggiungibili attraverso l’integrazione di sensori e attuatori soft stampati in 3D con algoritmi di machine learning e FEM”, hanno concluso i ricercatori. “Gli attuatori e i sensori integrati stampati in 3D sono fattibili ma limitati dalla natura dei materiali utilizzati. Il futuro del potenziamento dei robot soft stampati in 4D a circuito chiuso si basa di conseguenza sull’integrazione di materiali adeguati, approcci di apprendimento automatico e algoritmi di controllo “.
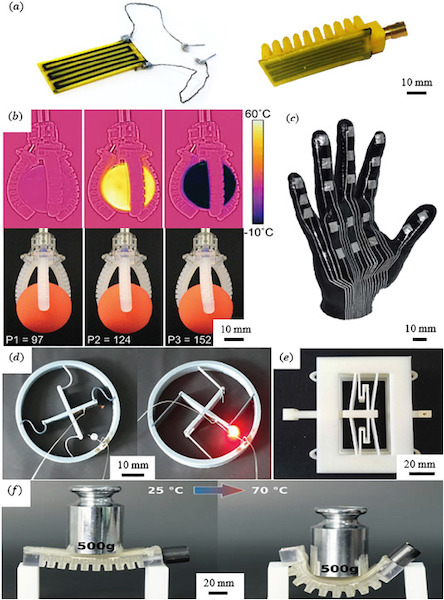
Sensori e attuatori morbidi stampati in 3D integrati: (a) sensore incorporato stampato in 3D in attuatore morbido pneumatico (riprodotto con il permesso di SPIE [126]); (b) pinza morbida stampata in 3D con sensori incorporati stampati (riprodotta con il permesso di John Wiley and Sons [9]); (c) sensore tattile stampato in 3D su mano protesica stampata in 3D (riprodotto con il permesso dell’American Chemical Society [34]); (d) attuatore termico multistabile stampato in 4D (riprodotto con il permesso di John Wiley and Sons [150]); (e) Attuatore morbido stampabile in 3D (riprodotto con il permesso di MDPI [148]); (f) Attuatore morbido a rigidità variabile stampato in 3D con un circuito di riscaldamento joule integrato (riprodotto con il permesso di John Wiley and Sons [151]). 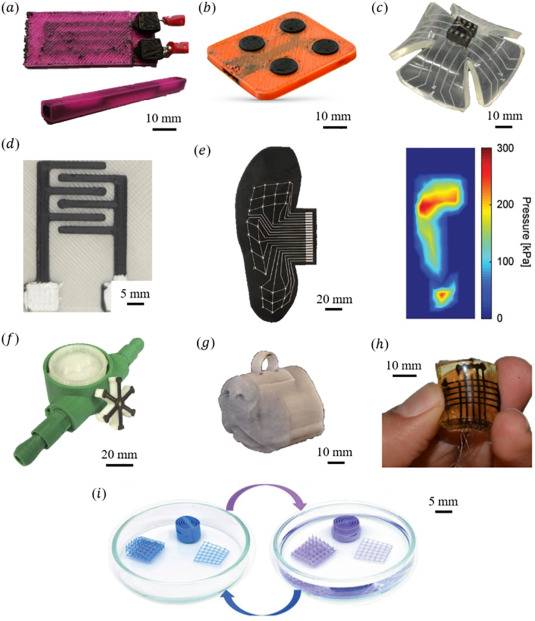
Sensori stampati in 3D con applicazioni in robot soft stampati in 4D. a) sensore di deformazione integrato stampato in 3D (riprodotto con l’autorizzazione delle pubblicazioni di Copernicus per conto di AMA [42]); (b) elettrodi sEMG stampati in 3D (riprodotti con il permesso di Copernicus Publications per conto di AMA [42]); (c) sensore piezoelettrico stampato in 3D nel robot molle per meduse (riprodotto con il permesso di SPIE [67]); (d) sensore di lingua elettronica stampato in 3D (riprodotto con il permesso di Frontiers [110]); (e) sensori di pressione stampati in 3D (riprodotti con il permesso di John Willey and Sons [71]); (f) Sensore di portata del fluido stampato in 3D (riprodotto con il permesso di IOP Publishing [98]). (g) muso di cane stampato in 3D per il rilevamento di gas (riprodotto con l’autorizzazione di Nature Publishing Group [109]); (h) sensore tattile flessibile stampato in 3D (riprodotto con il permesso di Springer [58]); (i) sensori termocromici e solvatocromatici stampati in 3D (riprodotti con il permesso di John Wiley and Sons [100]).