GLI SCIENZIATI DI SEOUL STAMPANO IN 3D SENSORI MORBIDI MULTIFUNZIONALI PER CONSENTIRE LE INTERAZIONI UOMO-ROBOT
I ricercatori della Seoul National University (SNU) hanno sviluppato nuovi sensori stampati in 3D che consentono agli esseri umani di interagire a distanza con sistemi di robotica morbida deformabili.
I dispositivi multifunzionali, che si sono dimostrati in grado di allungarsi e piegarsi in forme complesse a piacimento, forniscono anche capacità di rilevamento ottiche, microfluidiche e piezoresistive. Durante i test, il team è stato in grado di integrare i propri sensori sia negli attuatori indossabili che in quelli guidati da stimoli, consentendo agli utenti di controllare più apparecchi robotici a distanza.
Sono già state condotte notevoli ricerche per rendere i sistemi robotici più interattivi, sia con i loro ambienti che con gli esseri umani. In primo luogo, questi studi si sono concentrati su sensori che consentono risposte a input come resistenza o intensità della luce, ma molti possono rilevare solo una modalità di deformazione alla volta.
Sebbene i dispositivi microfluidici e in tessuto abbiano mostrato risultati promettenti in quest’area, non possono distinguere tra diversi tipi, poiché hanno un solo elemento di rilevamento. Dato che un singolo stimolo può indurre più risposte di deformazione, la creazione di un sensore morbido più adattabile rimane quindi altamente desiderabile.
Sono stati adottati diversi approcci per creare robotica multimodale, inclusa l’incorporazione di canali fluidici o elementi di rilevamento in strutture elastomeriche. Tuttavia, la combinazione fisica dei sensori in un’unica struttura ha spesso influenzato le loro dimensioni e aumentato la complessità dei processi di progettazione e fabbricazione.
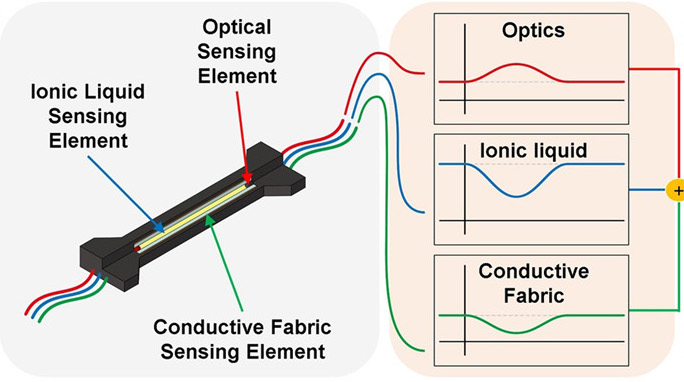
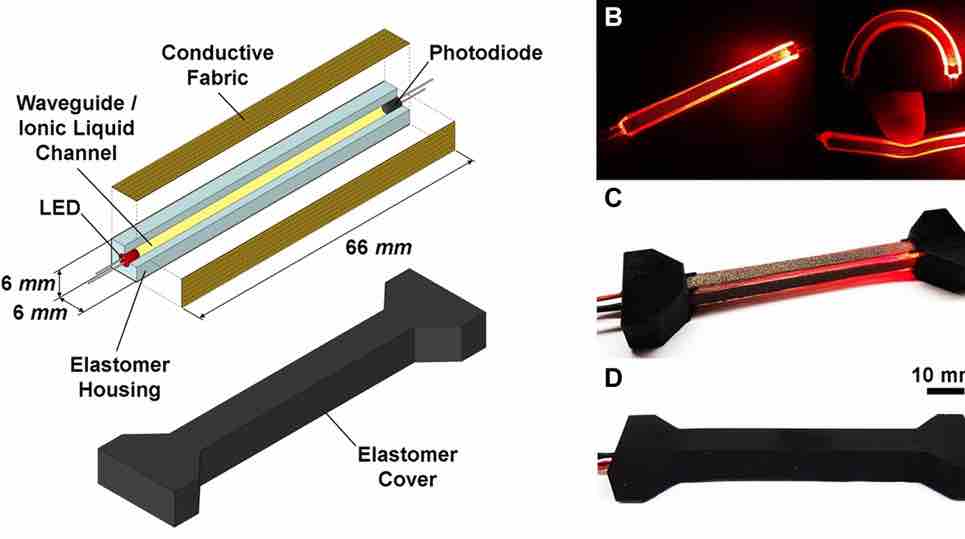
Per superare i limiti dei progetti precedenti, il team ha stampato in 3D un sensore multifunzionale, in grado di rilevare singole modalità di deformazione e disaccoppiarle tutte in una volta. Il dispositivo stesso presentava un canale microfluidico riempito con un liquido ionico, un alloggiamento elastomerico e uno strato di tessuto conduttivo.
In teoria, quando il progetto del team è stato sottoposto a deformazione, i suoi canali avrebbero agito come un sensore e avrebbero cambiato la sua resistenza elettrica. Per metterlo in pratica, i ricercatori hanno sottoposto il loro dispositivo a forze diverse e hanno implementato una tecnica di apprendimento automatico insieme a simulazioni per misurare le sue capacità multimodali.
Il sensore è stato piegato dall’asse neutro di un giunto rotazionale, prima dell’applicazione della pressione di contatto locale, per simulare allungamento, compressione e flessione. I risultati hanno rivelato che la sensibilità dei segnali del dispositivo cambiava a seconda di dove veniva applicata la pressione, dimostrando che poteva reagire agli stimoli esterni.
Per dimostrare il potenziale del loro sensore all’interno delle interfacce uomo-robot, gli scienziati hanno costruito due sistemi prototipo. Uno era un dispositivo indossabile che consentiva agli utenti di controllare con precisione un UAV e un braccio robotico, mentre l’altro era un “polso” robotico morbido composto da quattro attuatori, in grado di reagire a forze esterne.
Sebbene il team abbia ammesso che sono necessari ulteriori test per eliminare le fasi di produzione manuale, considera il proprio dispositivo un importante passo avanti rispetto ad altri progetti. In futuro, gli scienziati ritengono che il loro sensore potrebbe essere applicato all’interno di robot più grandi, fornendo loro fino a dieci diverse capacità di rilevamento.