Un gruppo di ricerca della Harvard John A. Paulson School of Engineering and Applied Sciences ha sviluppato un metodo di stampa 3D per produrre filamenti morbidi capaci di piegarsi, torcersi, espandersi o contrarsi quando vengono riscaldati o raffreddati. Il comportamento ricorda quello dei muscoli biologici, ma il principio non è quello di imitare un muscolo cellula per cellula. L’idea è più concreta: programmare il movimento direttamente nella geometria interna e nella distribuzione dei materiali del filamento.
Il lavoro nasce nel laboratorio di Jennifer A. Lewis, Hansjörg Wyss Professor of Biologically Inspired Engineering ad Harvard SEAS e ricercatrice legata anche al Wyss Institute for Biologically Inspired Engineering. Il primo autore dello studio è Mustafa K. Abdelrahman. Tra gli altri autori figurano Jackson K. Wilt, Yeonsu Jung, Rodrigo Telles, Gurminder K. Paink, Natalie M. Larson, Joanna Aizenberg e L. Mahadevan.
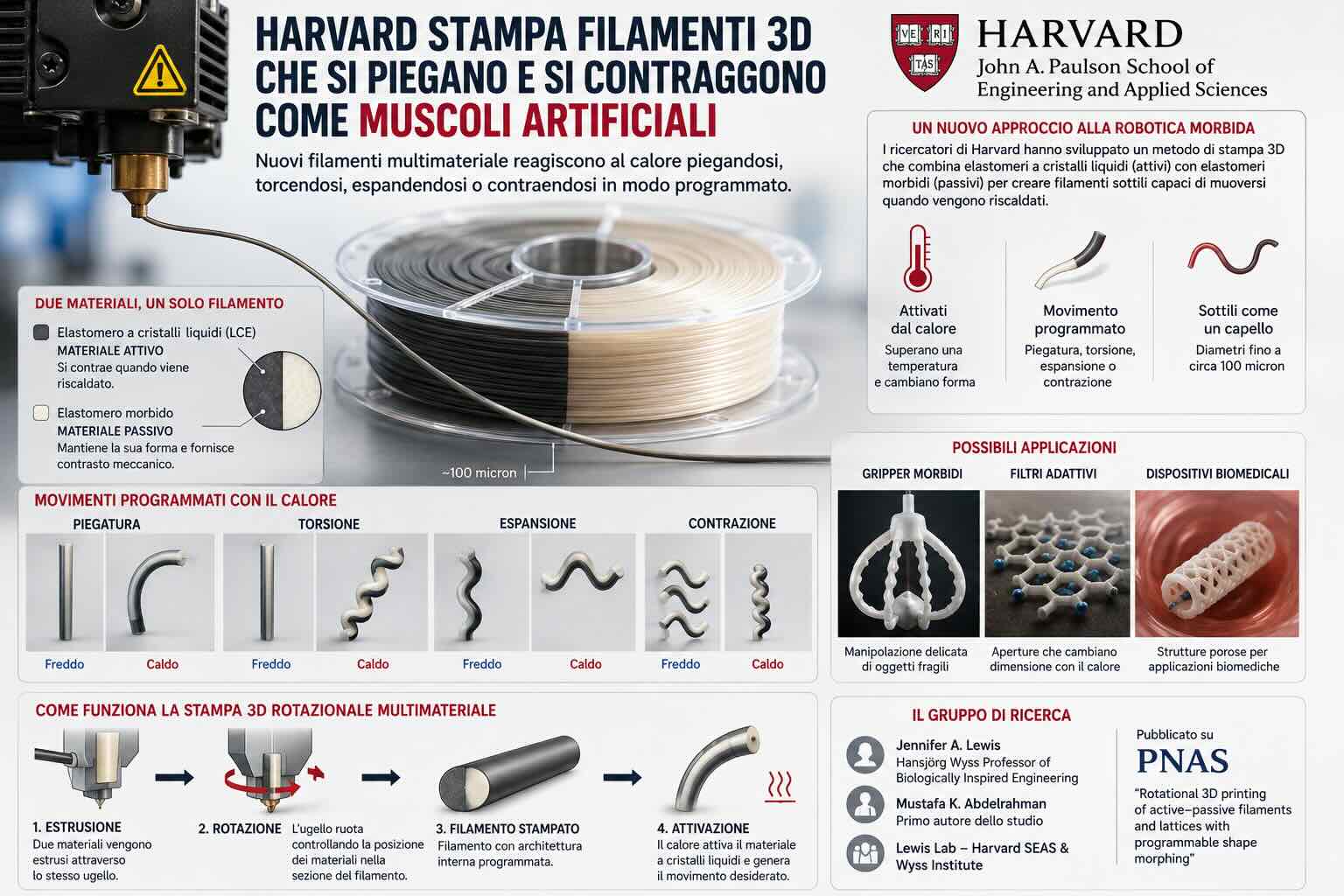
Lo studio è stato pubblicato su Proceedings of the National Academy of Sciences con il titolo “Rotational 3D printing of active–passive filaments and lattices with programmable shape morphing”. Il lavoro prosegue una linea di ricerca del Lewis Lab sulla stampa 3D multimateriale rotazionale, già usata per controllare l’architettura interna di filamenti complessi.
Come funziona il materiale
Il sistema usa due materiali diversi nello stesso filamento. Il primo è un elastomero a cristalli liquidi, indicato spesso con la sigla LCE. È il materiale attivo: quando supera una certa temperatura, le sue molecole cambiano disposizione e il materiale tende a contrarsi lungo una direzione preferenziale. Il secondo è un elastomero morbido passivo: non cambia forma nello stesso modo e agisce come elemento di contrasto meccanico.
Il movimento nasce dall’interazione tra queste due parti. Se una zona del filamento si accorcia e l’altra resta più stabile, il filamento si piega. Se la disposizione interna viene ruotata lungo il percorso di stampa, il filamento può torcersi o avvolgersi. In pratica, la forma finale del movimento non viene aggiunta con motori, cerniere o componenti esterni, ma viene scritta dentro il materiale durante la fabbricazione.
È un punto importante perché molti sistemi di robotica morbida richiedono stampi, canali pneumatici, assemblaggi e passaggi manuali. In questo caso il gruppo di Harvard lavora su un filamento che contiene già le istruzioni del movimento.
Il ruolo della stampa 3D multimateriale rotazionale
La tecnica usata si chiama rotational multimaterial 3D printing, o RM-3DP. Il principio è quello di estrudere più materiali attraverso un ugello che può ruotare mentre stampa. Non si tratta soltanto di depositare due materiali nello stesso punto, ma di decidere dove si trovano all’interno della sezione del filamento e come questa disposizione cambia lungo la sua lunghezza.
Il controllo della rotazione dell’ugello permette di orientare la parte attiva e quella passiva in modo preciso. Il filamento può quindi avere una curvatura naturale, una torsione programmata o una combinazione dei due comportamenti. Il movimento non dipende da un disegno superficiale, ma da una struttura interna tridimensionale.
Il gruppo descrive questi elementi come filamenti attivi-passivi. In alcuni casi vengono creati filamenti Janus, cioè con due regioni distinte nella sezione: una attiva e una passiva. Quando il materiale attivo viene riscaldato, la differenza di risposta tra le due regioni genera deformazione controllata.
Filamenti sottili e movimento programmato
Harvard indica che i ricercatori hanno stampato filamenti con diametri fino a circa 100 micron. Per dare un riferimento semplice, si tratta di una scala simile a quella di un capello umano. L’obiettivo non è solo miniaturizzare il materiale, ma creare unità elementari che possano essere combinate in architetture più complesse.
Un singolo filamento può piegarsi. Una serie di filamenti può aprire e chiudere una maglia. Una rete di filamenti può cambiare porosità. Un reticolo può sollevarsi, trasformarsi in una cupola o funzionare come una piccola pinza.
Il gruppo ha mostrato, per esempio, filamenti sinusoidali che sembrano identici a occhio nudo ma si comportano in modo opposto a seconda della posizione dell’elastomero a cristalli liquidi. Se il materiale attivo si trova sul lato esterno della curvatura, il filamento tende a raddrizzarsi ed espandersi con il calore. Se si trova sul lato interno, il filamento tende a stringersi e contrarsi.
Questa differenza permette di progettare strutture che non si limitano a cambiare forma in modo generico, ma rispondono secondo una funzione precisa.
Filtri, gripper e strutture che cambiano geometria
Le dimostrazioni più interessanti riguardano strutture reticolari piatte formate da unità stampate. In un esempio, il reticolo si comporta come un filtro attivo: quando viene riscaldato, le aperture si modificano e possono lasciar passare particelle sferiche; quando viene raffreddato, la struttura cambia configurazione e trattiene o sostiene le particelle.
Un’altra dimostrazione riguarda un gripper di tipo pick-and-place. La struttura può essere abbassata su più piccoli cilindri, riscaldata per afferrarli, sollevata e poi raffreddata per rilasciarli. Il tutto senza pinze rigide, attuatori metallici o componenti separati.
In un terzo caso, i ricercatori hanno realizzato un reticolo con regioni che si espandono e si contraggono in modo alternato. Una volta riscaldato in un bagno d’olio, il reticolo si è trasformato in una struttura a cupola. La forma ottenuta ha seguito da vicino le simulazioni sviluppate dal gruppo di L. Mahadevan, che ha contribuito alla modellazione meccanica del sistema.
Perché questo lavoro interessa la robotica morbida
La robotica morbida cerca di creare dispositivi capaci di muoversi e interagire con oggetti delicati senza la rigidità tipica dei robot industriali convenzionali. Questo approccio è utile quando bisogna manipolare oggetti fragili, lavorare vicino al corpo umano o realizzare strumenti che devono adattarsi a superfici irregolari.
I filamenti di Harvard potrebbero servire in futuro per gripper riconfigurabili, piccoli attuatori, filtri a porosità variabile e valvole morbide. Il vantaggio principale è che il movimento viene programmato nel processo di stampa. Un progettista può quindi intervenire su geometria, materiale, orientamento molecolare e distribuzione della sezione, invece di costruire un sistema meccanico separato intorno al materiale.
Il potenziale riguarda anche dispositivi biomedicali. Harvard cita la possibilità di usare filamenti iniettabili che si intrecciano e si bloccano in posizione per formare strutture porose ad alta superficie, utili in scenari come la coagulazione controllata dei tessuti. È un campo che richiederà molti passaggi prima di qualsiasi applicazione clinica, ma mostra la logica del progetto: non stampare soltanto una forma, ma un materiale che possa cambiare configurazione dopo essere stato posizionato.
Il collegamento con i lavori precedenti del Lewis Lab
Il nuovo studio non nasce da zero. Il Lewis Lab lavora da anni su materiali stampabili, inchiostri funzionali e architetture multimateriale. Nel 2023 il gruppo aveva descritto su Nature una piattaforma RM-3DP capace di controllare l’orientamento locale di filamenti eterogenei con precisione sub-voxel. In quel lavoro erano stati realizzati filamenti elicoidali, attuatori elastomerici dielettrici e reticoli gerarchici con componenti interni programmati.
Un altro tassello è il lavoro sugli elastomeri a cristalli liquidi. In questi materiali, le proprietà di movimento dipendono molto dall’allineamento dei mesogeni, cioè le unità rigide che si orientano all’interno della matrice polimerica. Controllare questo allineamento durante la stampa è essenziale: se le molecole non sono orientate nel modo giusto, il materiale può muoversi poco, muoversi male o non seguire la geometria prevista.
In uno studio precedente, Harvard SEAS, Princeton University, Lawrence Livermore National Laboratory e Brookhaven National Laboratory hanno lavorato proprio su come prevedere e controllare l’allineamento negli LCE stampati in 3D, usando anche misure a raggi X durante il processo. Questo contesto aiuta a capire perché il nuovo risultato sia interessante: combina l’architettura multimateriale con il controllo dell’allineamento molecolare.
Chi è coinvolto nel progetto
Gli attori principali sono Harvard John A. Paulson School of Engineering and Applied Sciences, il Lewis Lab, il Wyss Institute for Biologically Inspired Engineering, il gruppo di L. Mahadevan e il laboratorio di Joanna Aizenberg. La caratterizzazione dell’allineamento molecolare ha coinvolto misure a raggi X presso Brookhaven National Laboratory, usando risorse della National Synchrotron Light Source II.
Il sostegno economico indicato nel lavoro arriva dalla National Science Foundation tramite Harvard Materials Research Science and Engineering Center e dall’Army Research Office attraverso il programma Multidisciplinary University Research Initiative. Alcune attività sono state svolte presso il Harvard University Center for Nanoscale Systems, supportato dalla NSF. Brookhaven National Laboratory opera nell’ambito del Department of Energy degli Stati Uniti.
Per quanto riguarda aziende private, nelle informazioni ufficiali sullo studio non risultano società industriali direttamente indicate come partner del progetto. È però citato l’Harvard Office of Technology Development, che ha protetto le innovazioni associate alla ricerca e sta valutando percorsi di commercializzazione. Questo significa che l’università considera il lavoro abbastanza maturo da richiedere tutela della proprietà intellettuale, anche se non equivale a un prodotto già pronto per il mercato.
I limiti da non ignorare
La tecnologia è ancora in fase di ricerca. Il movimento dei filamenti dipende dal riscaldamento oltre la temperatura di transizione dell’elastomero a cristalli liquidi. Nelle prove descritte, alcune strutture vengono attivate in bagni d’olio riscaldati. Questo è adatto alla verifica di laboratorio, ma non corrisponde ancora a un dispositivo autonomo in grado di lavorare in ambiente reale senza sistemi esterni di controllo termico.
C’è anche un problema di scala. I filamenti possono essere molto sottili, ma miniaturizzare ulteriormente il processo introduce compromessi tra dimensione dell’ugello, velocità di stampa, qualità dell’allineamento molecolare e forza del movimento. Ridurre il diametro non basta: bisogna mantenere la capacità del materiale attivo di contrarsi in modo utile.
Un altro punto riguarda la velocità e la ripetibilità. Per passare da una dimostrazione di laboratorio a un componente usabile servono cicli ripetuti, stabilità nel tempo, controllo della fatica del materiale e condizioni di attivazione compatibili con l’applicazione finale. Un gripper per manipolare piccoli oggetti, una valvola morbida e un materiale biomedicale iniettabile hanno requisiti molto diversi.
Perché la stampa 3D è centrale in questo approccio
In molte ricerche sui materiali attivi, il movimento viene ottenuto assemblando più strati o combinando materiali dopo la fabbricazione. La stampa 3D consente invece di depositare i materiali già nella posizione desiderata. Nel caso di Harvard, la rotazione dell’ugello aggiunge un livello ulteriore: non si controlla solo il percorso nello spazio, ma anche l’orientamento interno del materiale lungo il filamento.
Questo permette di trattare il filamento come un elemento programmabile. La forma della sezione, la distribuzione dei materiali e la rotazione durante la deposizione diventano variabili di progetto. È una logica vicina alla stampa 4D, dove un oggetto stampato cambia forma nel tempo in risposta a uno stimolo, ma qui il punto chiave è il controllo interno del filamento.
Per la produzione additiva, il messaggio è chiaro: la stampa 3D non serve soltanto a creare geometrie complesse. Può essere usata anche per incorporare movimento, risposta termica e comportamento meccanico dentro il materiale stesso.
Dove potrebbe arrivare questa ricerca
I ricercatori indicano diversi possibili sviluppi. Uno riguarda ugelli più complessi, capaci di integrare altri materiali o funzionalità. Jackson Wilt cita, per esempio, la possibilità di aggiungere canali di metallo liquido o altri elementi utili per l’attuazione e il controllo. Questo aprirebbe la strada a filamenti non solo sensibili al calore, ma anche dotati di funzioni elettriche, conduttive o sensoriali.
Un’altra direzione è la progettazione computazionale. Se il comportamento del filamento può essere previsto con modelli meccanici, diventa possibile progettare una struttura partendo dal movimento desiderato. Invece di stampare una forma e vedere come si comporta, il laboratorio può calcolare la distribuzione attiva-passiva necessaria per ottenere piegatura, torsione o sollevamento.
Per ora il lavoro dimostra soprattutto una piattaforma. Non siamo di fronte a un prodotto commerciale, né a un muscolo artificiale pronto per una protesi o per un robot chirurgico. Siamo di fronte a un metodo che mostra come un materiale morbido stampato in 3D possa contenere istruzioni di movimento già nella sua architettura.
Un passo verso materiali che non restano fermi
Il lavoro di Harvard conferma una tendenza sempre più evidente nella ricerca sui materiali stampati: gli oggetti non devono essere soltanto leggeri, resistenti o complessi nella forma. Possono anche essere attivi, riconfigurabili e capaci di rispondere agli stimoli.
I filamenti sviluppati dal gruppo di Jennifer Lewis rappresentano un esempio concreto di questa direzione. L’oggetto stampato non è un componente passivo a cui aggiungere un motore, ma una piccola unità strutturale che può muoversi perché la sua composizione interna è stata progettata per farlo.
Per robotica morbida, filtri adattivi, valvole e possibili applicazioni biomedicali, questo approccio potrebbe ridurre la distanza tra materiale e macchina. Il movimento non viene più solo trasmesso al materiale: viene costruito nel materiale.