I RICERCATORI DI TIANJIN SVILUPPANO UN ROBOT MORBIDO PER ARRAMPICATA SU TUBI COMPLETAMENTE STAMPATO IN 3D
Gli scienziati dell’Università cinese di Tianjin hanno stampato in 3D un robot personalizzabile in grado di ridimensionare e monitorare i tubi negli impianti industriali in tempo reale.
Il dispositivo monopezzo è dotato di una serie di meccanismi di piegatura morbida e pinze modulari, che gli consentono di arrampicarsi in modo flessibile su infrastrutture dalla forma strana. Dato che le interruzioni della pipeline spesso portano a ritardi nella produzione e molte aziende le ispezionano ancora manualmente, i robot del team potrebbero rappresentare un’alternativa nuova e più efficiente.
All’interno di molte fabbriche, le condutture rappresentano una base vitale da cui dipendono l’efficienza industriale e, in ultima analisi, la produttività della produzione. Anche piccole rotture possono causare interruzioni significative della produzione, quindi l’ispezione costante di perdite è diventata una necessità per numerose aziende di grandi dimensioni.
Al momento, le aziende industriali tendono a utilizzare il personale per monitorare manualmente i tubi, ma questo metodo è sia laborioso che potenzialmente pericoloso, soprattutto se il condotto trasporta sostanze chimiche pericolose. Di conseguenza, lo sviluppo di robot che possono invece assumere compiti così pericolosi, è diventato un’importante area di ricerca.
Sebbene studi precedenti abbiano prodotto una serie di soluzioni robotiche, tendono ad essere dispositivi di arrampicata su tubi interni o esterni, non entrambi. Inoltre, il primo richiede la chiusura della rete di trasporto per funzionare, e per le condutture interrate non c’è modo di evitarlo mantenendole dall’esterno.
Con i recenti progressi nella robotica morbida, tuttavia, la fabbricazione di dispositivi complessi è diventata più facile, soprattutto se confrontata con la complessità dell’utilizzo dello stampaggio. Di conseguenza, adottando la stampa 3D, il team di Tianjin è stato in grado di creare un dispositivo ottimizzato in grado di ispezionare i tubi in modo più flessibile rispetto a prima.
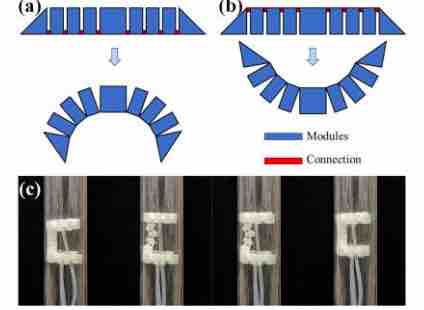
Per massimizzare la flessibilità del loro bot, gli scienziati lo hanno progettato con un meccanismo di piegatura morbida monopezzo, in grado di sostenere alti livelli di deformazione. L’utilizzo del software CAD per creare il dispositivo lo ha anche reso facilmente aggiornabile e ha consentito al team di aggiungere moduli o regolare il diametro delle pinze a piacimento.
Il layout del robot consisteva in una sezione centrale con pinze alle estremità, oltre a tre tubi di aspirazione, che ne consentivano il controllo e l’applicazione della pressione su richiesta. Pressurizzando e depressurizzando alternativamente le pinze del dispositivo, gli scienziati sono stati in grado di eseguire un movimento di “arrampicata”, anche se sotto il loro controllo diretto.
Durante il test, il robot ha dimostrato una coppia erogata di 85 Nmm, sufficiente per arrampicarsi su tubi con un diametro di 16–38 mm, a una velocità di 14 mm p / s. Il dispositivo è stato anche in grado di scalare le reti acriliche con angoli di 45 ° e 90 °, rendendolo potenzialmente ideale per l’ispezione di tubazioni inclinate che possono essere difficili da navigare.
Dato che il loro robot si è dimostrato in grado di arrampicarsi sia internamente che esternamente e di ruotare in direzioni longitudinali o laterali, il team lo ha considerato un aggiornamento dei progetti esistenti. In futuro, gli scienziati intendono integrare i sensori nel loro dispositivo, consentendogli di diventare una soluzione autonoma per la manutenzione dei tubi.
“Camminare” con robot morbidi stampati in 3D
Grazie alla flessibilità di progettazione fornita dalla stampa 3D, un numero crescente di ricercatori è stato in grado di produrre robot innovativi, in grado di eseguire azioni avanzate di camminata, arrampicata e luccichio.
I ricercatori dell’Istituto nazionale di scienza e tecnologia di Ulsan (UNIST) hanno creato un robot da parete stampato in 3D . Ispirato dalle capacità naturali del geco, il robot quadrupede della squadra è persino in grado di scalare le superfici bagnate.
Allo stesso modo, un altro team di UNIST ha combinato la stampa 3D con lo stampaggio a iniezione per produrre un robot a forma di stella marina che cammina . I cinque “arti” del dispositivo agiscono come tendini in un sistema biomeccanico che può essere attivato per eseguire movimenti controllati.
Altrove, gli scienziati dell’Università dell’Illinois hanno integrato la materia biologica nel loro progetto fondendo il midollo spinale di un ratto in un robot morbido, per creare un microbot ambulante stampato in 3D . Il bio-robot è alimentato da una contrazione muscolare modellata nella colonna vertebrale, che a sua volta muove i suoi “piedi”.
I risultati dei ricercatori sono dettagliati nel loro documento intitolato ” Robot modulare per arrampicarsi su tubi completamente stampato in 3D “, che è stato co-autore di Disheng Xie, Jianbin Liu, Rongjie Kang e Siyang Zuo.