L’Agenzia Spaziale Europea, ESA, ha affidato a un consorzio guidato dal Danish Technological Institute lo sviluppo di una copertura protettiva multifunzione per bracci robotici destinati ad ambienti spaziali. Il progetto si chiama Smart Skin for Exploration Cobots e punta a portare la tecnologia a un livello dimostrabile in condizioni simili a quelle operative, con test previsti nell’arco di un programma da 24 mesi, tra il 2026 e il 2028. Il budget indicato è di 1,65 milioni di euro e l’obiettivo è arrivare a due soluzioni funzionali testate in condizioni rappresentative dello spazio.
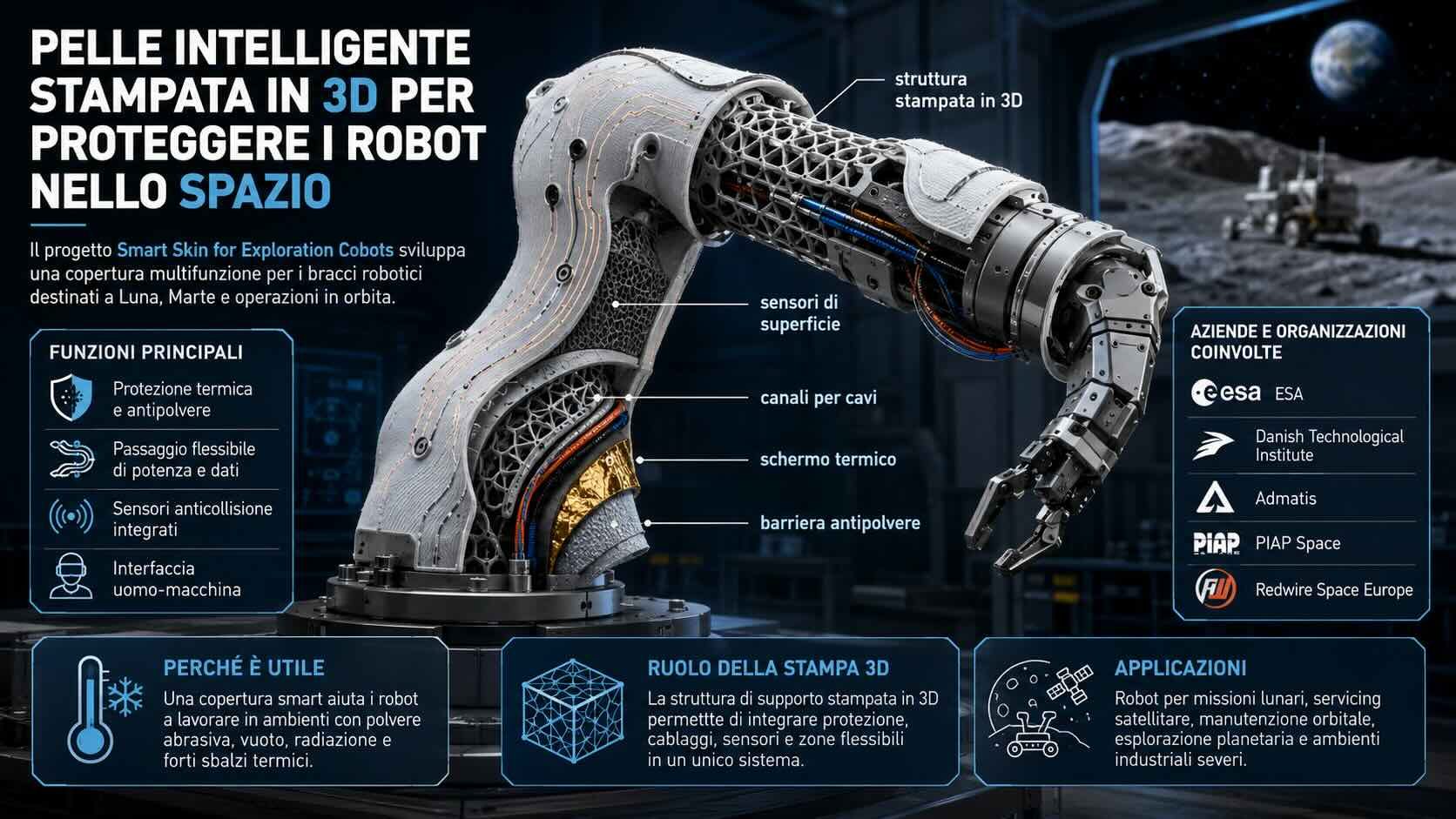
Il tema non riguarda solo la protezione meccanica. La “pelle” in sviluppo dovrà combinare isolamento termico, barriera contro polveri abrasive, instradamento di cavi di potenza e dati, sensoristica anticollisione e interfacce per l’interazione uomo-macchina. Al centro del sistema c’è una struttura di supporto stampata in 3D, pensata per essere montata su un braccio robotico e adattata a configurazioni diverse.
Perché un robot spaziale ha bisogno di una pelle
Quando si parla di robot per l’esplorazione spaziale, si pensa spesso a rover, manipolatori, sistemi autonomi e bracci meccanici per attività di manutenzione. In realtà, un robot che lavora sulla Luna, su Marte o in orbita deve affrontare condizioni molto diverse da quelle di un impianto industriale terrestre. Il problema non è solo “funzionare”, ma continuare a farlo mentre il materiale esterno è esposto a vuoto, polvere, radiazione solare e cicli termici estremi.
Le condizioni indicate per il progetto arrivano da circa -150 °C a +120 °C, con presenza di polveri abrasive, radiazione intensa e vincoli di autonomia. In un contesto del genere un braccio robotico non può essere trattato come una normale macchina industriale con una copertura flessibile. Ogni elemento esterno deve resistere, piegarsi dove serve, non interferire con il movimento e non compromettere sensori, giunti, cablaggi o punti di presa.
La scelta di chiamarla “pelle” è quindi abbastanza precisa: non si tratta di una custodia rigida, ma di uno strato funzionale che deve accompagnare il movimento del robot e allo stesso tempo aggiungere capacità. Deve proteggere, ma anche trasportare segnali, integrare sensori e permettere una collaborazione più sicura con astronauti o altri sistemi robotici.
Il ruolo della stampa 3D
La stampa 3D entra nel progetto come tecnologia per creare lo scaffold, cioè la struttura portante su cui vengono integrati gli altri elementi. In una copertura per bracci robotici non basta avere un guscio con una forma generica. Servono passaggi per cavi, zone flessibili, aree rinforzate, punti di fissaggio, geometrie locali compatibili con giunti, sensori e superfici che cambiano direzione durante il movimento.
Il Danish Technological Institute indica la manifattura additiva tra le competenze chiave del progetto insieme a robotica, materiali funzionali, elettronica stampata ed e-textile. La stampa 3D consente di progettare una struttura più vicina alla geometria reale del braccio robotico, senza dipendere solo da pannelli o coperture standard.
Nel caso di un braccio destinato allo spazio, la libertà geometrica non è un dettaglio estetico. Se la copertura è troppo rigida, ostacola il movimento. Se è troppo morbida, può non proteggere o può creare zone in cui la polvere si accumula. Se i cavi sono esterni e non guidati, aumentano i rischi di abrasione, impigliamento e fatica meccanica. La struttura stampata in 3D serve quindi a dare ordine a un sistema che deve restare flessibile ma controllato.
Quattro funzioni in un unico sistema
La Smart Skin for Exploration Cobots viene progettata per svolgere quattro funzioni principali.
La prima è la protezione termica e antipolvere. La Luna, Marte e l’ambiente orbitale espongono i materiali a sbalzi di temperatura e particelle fini. Il caso della polvere lunare è particolarmente delicato perché le particelle sono abrasive e possono infiltrarsi in giunti, cerniere e interfacce. Per un braccio robotico, la protezione contro la polvere deve essere compatibile con parti mobili, non solo con superfici statiche.
La seconda funzione è il passaggio flessibile di potenza e dati. Un robot spaziale ha bisogno di cavi, segnali e alimentazione. Portarli all’esterno in modo non protetto può essere rischioso; inglobarli in una pelle funzionale può ridurre esposizione e disordine meccanico. Il progetto considera la pelle anche come una sorta di harness esterno flessibile, capace di guidare i collegamenti lungo il braccio.
La terza funzione riguarda i sensori per rilevare e prevenire collisioni. Un braccio robotico che lavora vicino a strumenti, habitat, lander, rover o astronauti deve sapere quando si avvicina troppo a un ostacolo. Una superficie sensorizzata può dare informazioni distribuite, non limitate ai soli encoder dei giunti o alle telecamere esterne.
La quarta funzione è l’interazione uomo-macchina. Per ESA e per il consorzio, i robot non sono solo macchine isolate: in alcuni scenari dovranno collaborare con astronauti o con operatori remoti. Una pelle dotata di interfacce, segnali visivi o elementi sensibili al contatto può rendere più semplice e sicura questa collaborazione.
Dai rivestimenti statici alle coperture per parti mobili
I veicoli spaziali usano da tempo sistemi di isolamento multistrato, noti come Multi-Layer Insulation o MLI. Sono quelle coperture sottili, spesso dall’aspetto metallizzato, che proteggono satelliti, strumenti e sonde dagli scambi termici. La differenza è che molte applicazioni MLI sono pensate per superfici quasi statiche.
Un braccio robotico è un caso più difficile. Si muove, si piega, ruota, può estendersi, avvicinarsi a superfici sporche o urtare oggetti. Una copertura per questo tipo di componente deve mantenere prestazioni termiche e protezione antipolvere senza impedire il movimento. Inoltre deve sopportare cicli ripetuti, non solo una configurazione fissa.
Qui entra in gioco Admatis, società ungherese specializzata in tecnologie spaziali e protezione termica. Nel consorzio, Admatis sviluppa la parte legata al sistema di protezione termica. L’azienda lavora su radiatori satellitari, isolamento multistrato, rivestimenti termo-ottici, analisi termiche, prove ambientali e integrazione di componenti per missioni spaziali.
I partner europei coinvolti
Il progetto riunisce competenze diverse. Il Danish Technological Institute, in Danimarca, coordina le attività e contribuisce con competenze in robotica, materiali funzionali e stampa 3D industriale. Admatis, in Ungheria, si occupa della protezione termica. PIAP Space, in Polonia, e Redwire Space Europe, in Lussemburgo, forniscono bracci robotici e competenze tecniche legate ai sistemi spaziali.
La presenza di PIAP Space e Redwire Space Europe è importante perché la pelle non viene sviluppata su un braccio generico da laboratorio. Il progetto punta a lavorare su bracci collegati alle future missioni lunari ESA, in modo da progettare la protezione tenendo conto di dimensioni, giunti, movimenti e requisiti reali.
Redwire Space Europe ha una struttura in Lussemburgo dedicata allo sviluppo di bracci robotici per missioni orbitali e free-flying, con applicazioni in servicing satellitare, rifornimento, manifattura nello spazio, cattura di detriti e gestione di payload. PIAP Space lavora invece su soluzioni robotiche per applicazioni spaziali, inclusi progetti di bracci multi-articolati per attività di servicing e deorbiting.
Perché servono sensori sulla superficie
Un robot spaziale può essere controllato a distanza, può eseguire sequenze autonome o può collaborare con esseri umani. In tutti e tre i casi, la percezione dell’ambiente è essenziale. Telecamere, LIDAR e sensori di posizione danno informazioni importanti, ma non sempre bastano per capire cosa accade sulla superficie del braccio.
Una pelle sensorizzata può rilevare contatti, urti, pressioni anomale o condizioni che suggeriscono un rischio di collisione. Per un robot che lavora accanto a un astronauta, questa capacità può ridurre il rischio di movimenti pericolosi. Per un robot che opera su una base lunare o vicino a un satellite, può evitare danni a strumenti, pannelli solari, antenne o componenti fragili.
Il progetto richiama anche il tema dell’HRI, cioè Human-Robot Interface. Questo punto va oltre la protezione: una pelle può diventare un’interfaccia fisica, per esempio con segnali, superfici sensibili o elementi che permettono all’astronauta di capire lo stato del robot e interagire con il sistema in modo più immediato.
Elettronica stampata ed e-textile
La Smart Skin non è soltanto una parte stampata in 3D. Il Danish Technological Institute evidenzia il ruolo di elettronica stampata ed e-textile. Queste tecnologie permettono di integrare sensori, piste conduttive, interfacce, cablaggi tessili e funzioni distribuite in superfici flessibili.
Per un braccio robotico, gli e-textile possono essere utili perché seguono pieghe e movimenti meglio di soluzioni rigide. L’elettronica stampata può invece ridurre ingombri e peso rispetto a sensori separati montati uno per uno. Il vantaggio potenziale sta nella distribuzione della funzione: non un singolo sensore in un punto, ma una superficie che partecipa al comportamento del robot.
Questa è anche una delle difficoltà. Portare elettronica flessibile nello spazio significa affrontare radiazione, vuoto, fatica meccanica, adesione tra strati, compatibilità dei materiali e stabilità nel tempo. La pelle dovrà funzionare come un sistema integrato, non come una somma di componenti applicati dopo.
La protezione dalla polvere lunare
La polvere è uno dei problemi più sottovalutati nelle missioni lunari. Non si comporta come la normale polvere terrestre: è fine, abrasiva, tende ad aderire alle superfici e può interferire con giunti, guarnizioni, pannelli e meccanismi. In un robot con bracci mobili, la polvere può entrare proprio dove il movimento è necessario.
Una copertura progettata per ridurre la penetrazione di particelle può quindi prolungare la vita del braccio robotico. Non basta però sigillare tutto, perché un braccio deve muoversi. La sfida è creare una barriera capace di seguire i gradi di libertà del robot e al tempo stesso proteggere le zone esposte. Qui la stampa 3D può contribuire con geometrie locali dedicate, mentre tessuti tecnici e strati funzionali possono fornire la protezione superficiale.
Applicazioni: Luna, Marte e orbita
Il progetto è pensato per bracci robotici destinati a missioni lunari, future attività su Marte e operazioni in orbita. Le applicazioni citate includono estrazione di risorse sulla Luna, servicing satellitare, rimozione attiva di detriti e attività di supporto all’esplorazione.
Nel servicing orbitale, un braccio robotico può ispezionare, afferrare, riposizionare o assistere un satellite. In una missione lunare può aiutare a movimentare strumenti, raccogliere campioni, lavorare con moduli di superficie o preparare infrastrutture. Su Marte il tema diventa ancora più complesso, perché le operazioni autonome devono fare i conti con ritardi nelle comunicazioni e ambienti difficili.
ESA colloca la robotica tra le tecnologie essenziali per l’esplorazione planetaria e ha lavorato su sistemi di automazione e robotica per Marte, Luna e altri corpi del Sistema Solare. In questo quadro, una pelle protettiva per bracci robotici non è un accessorio: è uno dei componenti che possono rendere più affidabile la presenza di robot in ambienti dove la manutenzione diretta è limitata.
Un possibile uso anche sulla Terra
Le tecnologie nate per lo spazio spesso trovano applicazioni in ambienti industriali severi. In questo caso, il Danish Technological Institute indica possibili usi in settori dove robot e macchine lavorano tra calore, sporco, urti e condizioni abrasive. Un esempio citato riguarda le fonderie, dove polvere, alte temperature e contaminanti possono ridurre la vita utile delle apparecchiature.
Una pelle protettiva con sensori e cablaggi integrati potrebbe essere utile anche in impianti siderurgici, miniere, cantieri, impianti chimici, offshore, centrali energetiche o linee produttive con materiali abrasivi. In questi scenari, il valore non sarebbe solo proteggere il robot, ma ridurre fermate, manutenzione e sostituzione di componenti esposti.
Il trasferimento a Terra non è automatico. I costi, i materiali e le qualifiche richieste per lo spazio non sono sempre compatibili con l’industria generale. Tuttavia, il principio tecnico — una copertura adattiva, funzionale e sensorizzata per macchine mobili — ha un campo di applicazione più ampio rispetto alle sole missioni spaziali.
Cosa rende il progetto interessante per la manifattura additiva
La parte più interessante per la stampa 3D è il passaggio da componente strutturale a piattaforma funzionale. Qui il pezzo stampato non è solo un supporto meccanico. È il punto in cui si incontrano isolamento, tessili tecnici, elettronica, sensori, cablaggi e interfacce.
Questo approccio è vicino a una delle direzioni più promettenti della manifattura additiva: produrre geometrie che non si limitano a sostituire pezzi tradizionali, ma permettono l’integrazione di funzioni diverse. Nel caso della Smart Skin, il valore non sta nel dire che una copertura è stata stampata in 3D, ma nel fatto che la stampa consente di adattare la pelle al robot e di predisporre lo spazio per funzioni che altrimenti richiederebbero componenti separati.
Resta il problema della qualifica. Ogni materiale stampato, ogni interfaccia flessibile, ogni sensore integrato e ogni giunzione tra strati dovrà dimostrare resistenza a cicli termici, vuoto, polvere, vibrazioni e movimento ripetuto. La stampa 3D offre libertà progettuale, ma nello spazio la libertà deve essere accompagnata da prove, dati e margini di sicurezza.
Una copertura per usare robot più commerciali
Un aspetto pratico riguarda la possibilità di proteggere bracci robotici con una copertura avanzata invece di riprogettare ogni componente da zero. Admatis collega il progetto alla possibilità di costruire bracci robotici partendo da componenti commerciali, aggiungendo poi un sistema di protezione adatto ad applicazioni spaziali.
Questo non significa prendere un robot industriale standard e mandarlo sulla Luna. Significa però che una pelle protettiva ben progettata potrebbe ridurre alcune barriere allo sviluppo, separando in parte il problema della robotica da quello dell’ambiente. Il braccio resta un sistema spaziale da qualificare, ma la protezione esterna può diventare un modulo adattabile.
Per ESA e per l’industria europea, questo approccio può aiutare a creare soluzioni più flessibili per missioni diverse: deep space, orbita terrestre, superficie lunare, supporto a infrastrutture, robot collaborativi e sistemi di manutenzione.
Un progetto da seguire nei prossimi test
Smart Skin for Exploration Cobots non è un prodotto commerciale pronto per missioni operative. È un programma di sviluppo e dimostrazione che dovrà mostrare se una pelle multifunzione può davvero resistere in condizioni spaziali simulate e mantenere le sue funzioni durante il movimento del braccio.
Il lavoro sarà interessante da seguire soprattutto su tre punti: la durata della copertura dopo cicli ripetuti, l’efficacia della protezione antipolvere sulle articolazioni e l’affidabilità dei sensori integrati nella pelle. Se questi aspetti saranno validati, la tecnologia potrà diventare un elemento utile per i robot che ESA e i partner industriali prevedono di usare in orbita, sulla Luna e, in prospettiva, su Marte.
Per la manifattura additiva, il progetto mostra un uso concreto della stampa 3D in un sistema complesso: non un singolo pezzo dimostrativo, ma una struttura che deve lavorare insieme a materiali flessibili, elettronica stampata, isolamento termico e robotica spaziale.