La stampa 3D non serve solo a produrre oggetti con una forma definita. In alcuni laboratori sta diventando uno strumento per costruire materiali che cambiano comportamento dopo la fabbricazione. È il caso del lavoro portato avanti dal gruppo di Jennifer A. Lewis alla Harvard John A. Paulson School of Engineering and Applied Sciences, dove i ricercatori hanno sviluppato filamenti morbidi capaci di piegarsi, torcersi, espandersi o contrarsi quando vengono riscaldati o raffreddati. Lo studio è stato pubblicato su Proceedings of the National Academy of Sciences con il titolo Rotational 3D printing of active–passive filaments and lattices with programmable shape morphing.
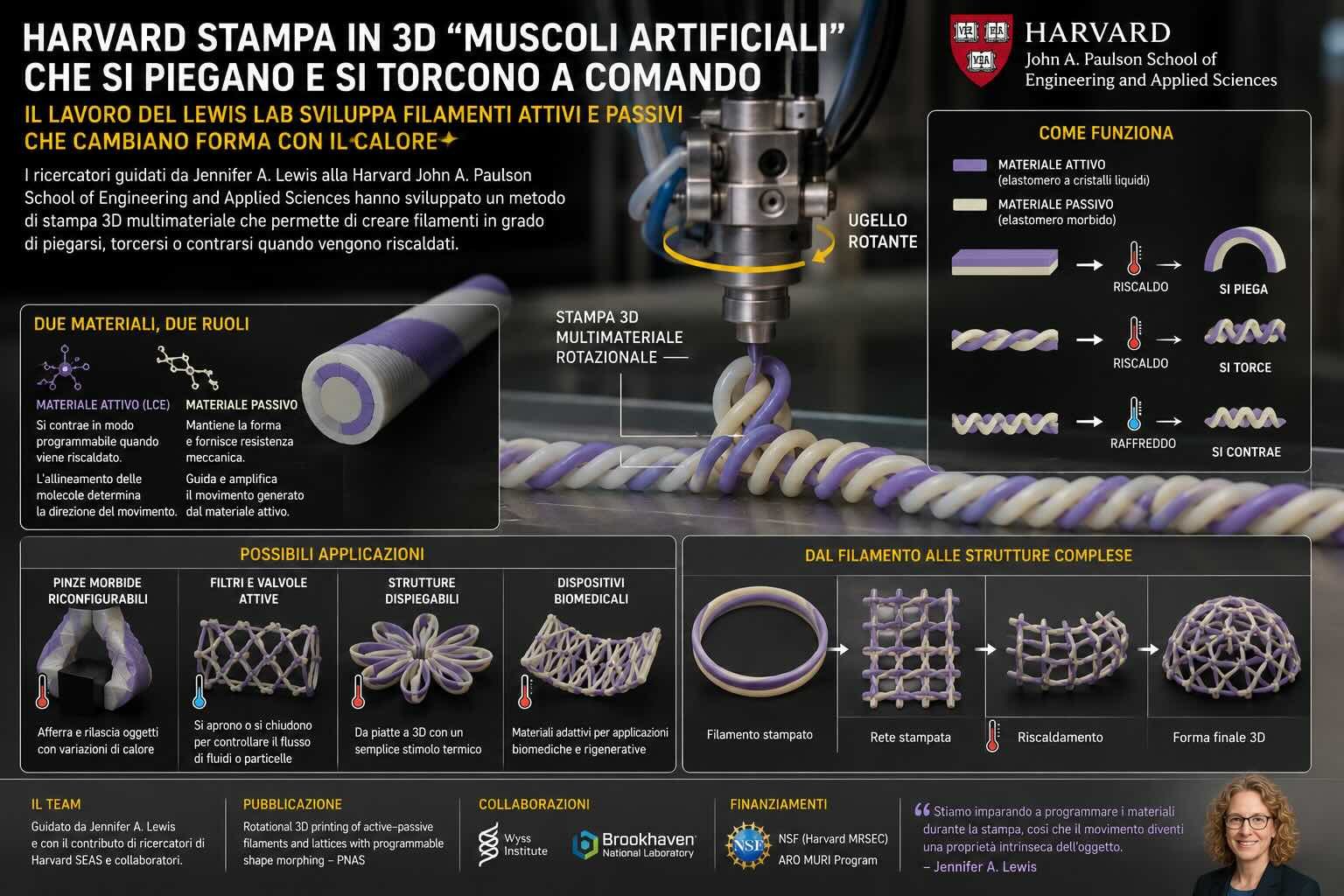
L’idea centrale è spostare il movimento dentro il materiale, invece di aggiungere motori, cerniere, fili, molle o attuatori esterni. Il filamento viene stampato con due materiali diversi: una parte “attiva”, che reagisce al calore, e una parte “passiva”, che mantiene la propria forma e guida meccanicamente la deformazione. Quando il materiale attivo si contrae e quello passivo resiste, il filamento non resta dritto: si curva, ruota o cambia configurazione secondo una geometria programmata durante la stampa.
Il ruolo del Lewis Lab
Il lavoro arriva dal Lewis Lab, diretto da Jennifer A. Lewis, Hansjörg Wyss Professor of Biologically Inspired Engineering a Harvard SEAS. Lewis è anche indicata da Harvard come Area Chair in Bioengineering e lavora su materiali soffici, biomateriali, fluidi, stampa 3D multimateriale e sistemi bioispirati.
Il primo autore dello studio è Mustafa K. Abdelrahman, ricercatore post-dottorato. Tra gli altri autori compaiono Jackson K. Wilt, Yeonsu Jung, Rodrigo Telles, Gurminder K. Paink, Natalie M. Larson, Joanna Aizenberg, L. Mahadevan e Jennifer A. Lewis. Harvard segnala anche la collaborazione con il gruppo di Mahadevan per la parte di meccanica delle strutture naturali e con il laboratorio di Aizenberg per la caratterizzazione dell’allineamento molecolare tramite scattering a raggi X, con misure svolte presso il Brookhaven National Laboratory.
Che cosa viene stampato
Il materiale non è un normale filamento rigido da stampante FDM. La tecnica usa una forma di stampa 3D multimateriale basata su estrusione di inchiostri morbidi, nella quale la testina deposita più materiali attraverso un ugello che ruota durante la fabbricazione. Il metodo è chiamato rotational multimaterial 3D printing, o RM-3DP.
Il materiale attivo è un elastomero a cristalli liquidi, indicato spesso con la sigla LCE. Questo tipo di polimero può contrarsi lungo una direzione preferenziale quando viene portato sopra una temperatura di transizione. Il materiale passivo è invece un elastomero morbido che non cambia forma nello stesso modo e funziona come una guida meccanica. Il movimento nasce proprio dal contrasto tra queste due regioni.
In una struttura a due strati, il principio è simile a quello di una lamina bimetallica: se un lato si accorcia e l’altro no, l’insieme si piega. Nel lavoro di Harvard il concetto è più avanzato perché la rotazione dell’ugello permette di distribuire le regioni attive e passive lungo la sezione del filamento, controllando non solo la curvatura ma anche la torsione.
Perché l’ugello rotante è importante
La parte più interessante non è solo la scelta dei materiali, ma il modo in cui vengono posizionati. L’ugello rotante permette di “scrivere” nel filamento una disposizione elicoidale dei materiali e dell’allineamento molecolare. In questo modo il filamento non viene stampato come un elemento uniforme: al suo interno ha una mappa di regioni attive e passive che determina il comportamento successivo.
La stampa, quindi, non produce soltanto la forma iniziale. Produce anche la risposta futura del materiale. Se l’area attiva viene disposta in un certo punto della sezione, il filamento si piega in una direzione. Se la distribuzione cambia lungo il percorso, la struttura può torcersi o assumere forme più complesse. Lo studio descrive questo approccio come una strategia centrata sul filamento, nella quale curvatura e torsione vengono codificate durante la fabbricazione.
Questa distinzione è importante per capire la differenza rispetto a molti sistemi di robotica morbida. In diversi dispositivi soft robotic il movimento viene ottenuto creando canali pneumatici, camere gonfiabili o parti assemblate in più fasi. Qui il comportamento è incorporato nella geometria interna del filamento e nella risposta termica dei materiali.
Dai filamenti singoli alle strutture reticolari
Una volta controllato il comportamento di un singolo filamento, il gruppo di Harvard ha usato questi elementi come mattoni per costruire reticoli e strutture più ampie. I ricercatori hanno stampato filamenti sinusoidali, cioè con andamento ondulato, apparentemente simili tra loro ma capaci di deformarsi in modo diverso a seconda della posizione del materiale attivo.
Quando l’elastomero a cristalli liquidi si trova all’esterno della curvatura, il riscaldamento porta il filamento a raddrizzarsi ed espandersi. Quando invece il materiale attivo si trova all’interno della curvatura, lo stesso stimolo produce contrazione. Da questa logica nascono celle che possono aprirsi, chiudersi, sollevarsi o formare superfici tridimensionali a partire da strutture piane.
Harvard descrive anche reticoli che funzionano come filtri attivi: a una certa temperatura si aprono e lasciano passare particelle sferiche, mentre al raffreddamento si richiudono o tornano a trattenere gli elementi. Un’altra dimostrazione riguarda una pinza “pick-and-place” capace di afferrare più piccoli cilindri, sollevarli e rilasciarli in seguito alla variazione di temperatura.
Il collegamento con la natura
Il lavoro prende ispirazione da filamenti e strutture naturali. Le proteine si ripiegano in forme tridimensionali che determinano la loro funzione; i viticci delle piante si avvolgono per sostenere la crescita; i tentacoli dei polpi e la proboscide degli elefanti combinano flessione, torsione e contrazione per manipolare oggetti. Lo studio cita questi esempi perché in natura la funzione non è separata dalla geometria: la disposizione interna della materia contribuisce direttamente al movimento.
Il gruppo di Harvard prova a trasferire questa logica nella produzione additiva. Invece di stampare un pezzo statico e poi aggiungere componenti mobili, il movimento viene trattato come una proprietà del materiale stampato. È un passaggio concettuale rilevante per la stampa 4D, espressione usata quando un oggetto stampato in 3D cambia forma nel tempo in risposta a uno stimolo esterno.
Un’evoluzione di una tecnologia già sviluppata dal gruppo
La stampa multimateriale rotazionale non nasce con questo studio. Nel 2023 il gruppo di Harvard SEAS e del Wyss Institute for Biologically Inspired Engineering aveva descritto un metodo per produrre filamenti elicoidali multimateriale, con un sistema di stampa composto da più cartucce e un ugello capace di combinare materiali diversi durante l’estrusione. In quel lavoro, pubblicato su Nature, il gruppo aveva già mostrato muscoli artificiali e reticoli elastici per robotica morbida e compositi strutturali.
Nel 2026 Harvard ha anche presentato un altro filone collegato alla robotica morbida pneumatica. In quel caso i ricercatori hanno stampato strutture con guscio esterno in poliuretano e un materiale interno rimovibile, il polossamero, creando canali cavi che si deformano quando vengono pressurizzati con aria. Quel lavoro riguarda attuatori morbidi gonfiabili; lo studio sui filamenti attivi-passivi, invece, sfrutta la risposta termica degli elastomeri a cristalli liquidi.
Questi due percorsi mostrano come il Lewis Lab stia usando la produzione additiva non solo per creare forme, ma per controllare comportamento, direzione del movimento e risposta a stimoli esterni. La differenza tra i due approcci è utile: nel sistema pneumatico serve una pressione interna, mentre nei filamenti LCE il comando principale è la temperatura.
Simulazione e previsione del movimento
Un punto importante dello studio riguarda la capacità di prevedere il movimento. Non basta ottenere un filamento che si piega: per usarlo in robotica o in dispositivi adattivi bisogna sapere prima quale forma assumerà e con quale intensità. Gli autori hanno usato simulazioni basate su modelli di aste elastiche per descrivere il comportamento dei filamenti Janus, cioè elementi con regioni attive e passive distribuite in modo asimmetrico.
Questa parte rende il metodo più vicino a una piattaforma di progettazione che a un semplice esperimento dimostrativo. Se la posizione del materiale attivo, la rotazione dell’ugello, il percorso di stampa e la temperatura permettono di prevedere il movimento, il progettista può passare da un comportamento desiderato al disegno del filamento. È una direzione utile per componenti morbidi che devono adattarsi a oggetti irregolari, aprire e chiudere passaggi, cambiare porosità o creare movimenti ripetibili senza componenti rigidi.
Applicazioni possibili
Le applicazioni indicate da Harvard includono pinze morbide riconfigurabili, filtri e valvole attive con porosità regolabile, architetture dispiegabili e filamenti intrecciati o iniettabili capaci di bloccarsi in posizione formando strutture porose ad alta superficie. Harvard cita anche possibili impieghi biomedici, per esempio in contesti dove servono materiali in grado di favorire una rapida coagulazione o stabilizzazione di tessuti biologici.
Nella robotica morbida, un sistema del genere potrebbe aiutare a costruire gripper che manipolano oggetti delicati senza dover calibrare motori e giunti rigidi. Nei dispositivi fluidici, reticoli che si aprono o si chiudono con la temperatura potrebbero servire come filtri regolabili. Nei sistemi deployable, cioè strutture che cambiano configurazione dopo il posizionamento, il vantaggio è ridurre l’assemblaggio e incorporare parte della funzione nel materiale stesso.
Non un muscolo biologico, ma un materiale attivo
Il termine “muscoli artificiali” va interpretato con attenzione. Questi filamenti non sono tessuto biologico, non contengono cellule muscolari e non si contraggono tramite impulsi nervosi. Sono materiali polimerici progettati per cambiare forma quando ricevono uno stimolo termico. Il paragone con il muscolo serve a spiegare la funzione: trasformare uno stimolo in movimento controllato.
Questa precisazione è utile anche per evitare aspettative sbagliate. Il lavoro non porta a breve termine a muscoli impiantabili pronti per l’uso clinico o a robot autonomi già disponibili sul mercato. Si tratta di una piattaforma di ricerca sui materiali attivi, con potenzialità per robotica morbida, dispositivi adattivi e sistemi biomedicali, ma con passaggi ancora aperti su scala, durata, integrazione e controllo in ambienti reali. Anche 3DPrint.com segnala che restano questioni da affrontare prima di arrivare a prodotti utilizzabili, in particolare per scalabilità e resistenza nel tempo.
La questione della scala
Harvard indica che il gruppo sta già esplorando la riduzione delle dimensioni dei filamenti. Con ugelli personalizzati e inchiostri regolati con precisione, i ricercatori hanno stampato filamenti con diametro di circa 100 micron, e vedono margini per spingersi oltre.
La miniaturizzazione è importante perché molti sistemi biologici e medicali lavorano su scale molto inferiori a quelle della robotica convenzionale. Un filamento da 100 micron può entrare in strutture porose, reticoli fini o dispositivi dove il movimento deve avvenire in spazi limitati. Tuttavia la riduzione della scala porta anche nuove difficoltà: controllo della viscosità degli inchiostri, precisione dell’ugello, ripetibilità dell’allineamento molecolare e gestione del trasferimento termico.
Chi sostiene il lavoro
La ricerca ha ricevuto supporto federale dalla National Science Foundation attraverso il programma Harvard MRSEC e dal programma ARO MURI. Alcune attività sono state svolte presso l’Harvard University Center for Nanoscale Systems, sostenuto dalla NSF, e altre presso la National Synchrotron Light Source II, infrastruttura gestita dal Brookhaven National Laboratory per il DOE Office of Science. Harvard segnala inoltre che il proprio Office of Technology Development ha protetto le innovazioni associate alla ricerca e sta seguendo opportunità di commercializzazione.
Questi nomi chiariscono che il lavoro non è un semplice prototipo isolato. Coinvolge Harvard SEAS, il Lewis Lab, competenze di meccanica teorica, caratterizzazione dei materiali, infrastrutture nazionali per analisi a raggi X e programmi federali statunitensi. In un settore come quello dei materiali attivi, la distanza tra dimostrazione di laboratorio e applicazione industriale richiede proprio questo tipo di collaborazione.
Perché interessa alla stampa 3D
Per chi segue la manifattura additiva, il punto non è solo il materiale che si muove. Il punto è che la stampa 3D diventa uno strumento per programmare una risposta meccanica. Il file di stampa non definisce soltanto una geometria esterna, ma anche la disposizione interna dei materiali e quindi il comportamento successivo.
Questo cambia il modo di progettare. Un componente tradizionale viene disegnato per mantenere la forma. Un materiale attivo viene disegnato per cambiare forma in modo utile. Nel primo caso si cerca stabilità; nel secondo si cerca una trasformazione controllata. La stampa multimateriale rotazionale permette di lavorare proprio su questa frontiera, perché mette insieme composizione, orientamento, percorso di deposizione e stimolo esterno.
Una direzione concreta per materiali adattivi
Il lavoro del gruppo di Jennifer Lewis non va letto come una promessa generica sui robot del futuro, ma come un passo tecnico nella progettazione di materiali che integrano movimento e funzione. I filamenti attivi-passivi mostrano che la deformazione può essere programmata durante la stampa, che la risposta può essere reversibile e che più unità possono essere organizzate in reticoli con comportamenti diversi.
La prospettiva più interessante è quella dei dispositivi morbidi che non hanno bisogno di molte parti assemblate. Un filtro che cambia porosità, una pinza che si adatta a più oggetti, una struttura che si incurva quando riceve calore o un materiale biomedicale che si blocca in una certa configurazione sono esempi di una stessa idea: usare la stampa 3D per costruire materia funzionale, non solo oggetti.
Per arrivare a sistemi commerciali serviranno prove su cicli ripetuti, tempi di risposta, precisione, resistenza, biocompatibilità dove richiesta e integrazione con fonti di stimolo controllabili. Ma il lavoro del Lewis Lab indica una strada chiara: progettare il movimento come parte della manifattura, trasformando il filamento stampato in un elemento attivo capace di piegarsi, torcersi e cambiare forma secondo un programma definito prima della stampa.