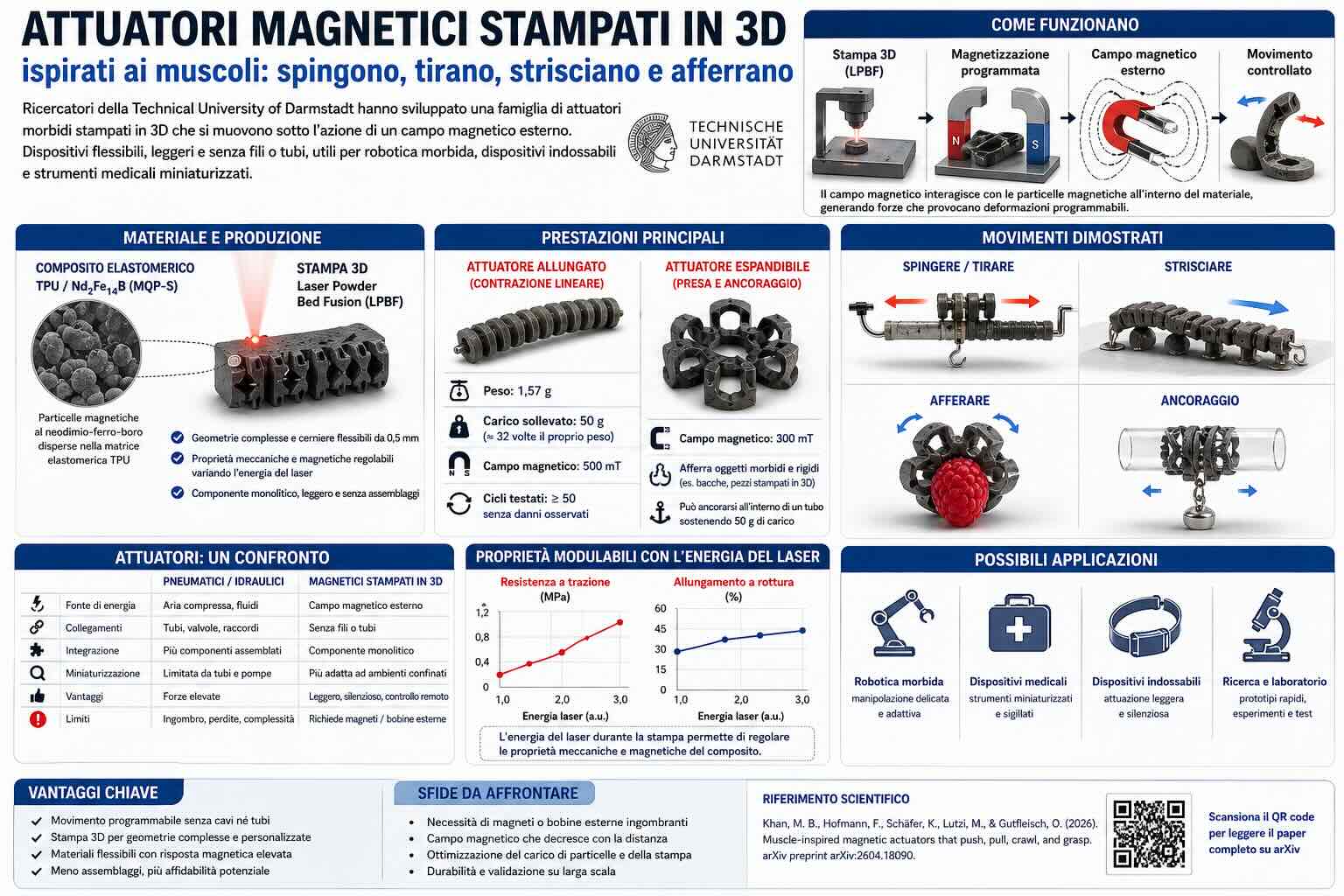
Un gruppo di ricerca della Technical University of Darmstadt ha sviluppato una famiglia di attuatori magnetici morbidi, realizzati tramite stampa 3D, capaci di produrre movimenti diversi: contrazione lineare, trazione, strisciamento, presa e ancoraggio. Il lavoro è descritto nel paper “Muscle-inspired magnetic actuators that push, pull, crawl, and grasp”, pubblicato su arXiv il 20 aprile 2026. Gli autori sono Muhammad Bilal Khan, Florian Hofmann, Kilian Schäfer, Matthias Lutzi e Oliver Gutfleisch, affiliati a Functional Materials, Institute of Materials Science e Additive Manufacturing Center della Technical University of Darmstadt.
La ricerca riguarda la robotica morbida, un settore in cui i dispositivi non sono costruiti solo con giunti rigidi, motori elettrici e telai metallici, ma con materiali deformabili capaci di piegarsi, adattarsi e interagire con oggetti delicati. In questo caso il movimento non è generato da tubi pneumatici, pompe, fili elettrici o sistemi idraulici, ma da un campo magnetico esterno che agisce sul materiale stampato.
Un materiale composito: TPU e particelle magnetiche NdFeB
Gli attuatori sono stati prodotti con un composito formato da TPU, cioè poliuretano termoplastico, e particelle magnetiche permanenti basate su Nd₂Fe₁₄B, una famiglia di magneti al neodimio-ferro-boro. Nel paper il materiale viene indicato come TPU/MQP-S. La produzione avviene tramite Laser Powder Bed Fusion, o LPBF, un processo additivo a letto di polvere in cui un laser fonde selettivamente il materiale strato dopo strato.
La scelta del TPU è coerente con l’obiettivo: ottenere componenti deformabili, capaci di piegarsi e recuperare la forma. Le particelle magnetiche, invece, permettono all’attuatore di rispondere a un campo magnetico esterno. In pratica, il pezzo stampato non è solo una struttura elastica, ma un corpo funzionale che può muoversi quando viene magnetizzato e poi sottoposto a un campo controllato.
In studi precedenti dello stesso filone di ricerca, il composito TPU/Nd-Fe-B veniva collegato a materiali come Flexa Grey di Sinterit e polvere magnetica MQP-S di Neo Magnequench. Questi nomi vanno letti come riferimenti tecnici ai materiali usati in lavori correlati, non come aziende necessariamente coinvolte nello sviluppo specifico del nuovo paper del 2026.
Perché non bastano gli attuatori pneumatici
La robotica morbida usa spesso attuatori pneumatici: strutture in elastomero che si gonfiano, si piegano o si contraggono grazie all’aria compressa. Sono sistemi efficaci, ma richiedono tubi, valvole, compressori e connessioni. Questo può diventare un limite quando il robot deve essere piccolo, leggero, sigillato o usato in ambienti difficili.
Esistono anche attuatori basati su calore, leghe a memoria di forma, elastomeri dielettrici o stimoli elettrici. Anche queste soluzioni hanno compromessi: alcune richiedono temperature elevate, altre tensioni importanti, altre ancora hanno tempi di risposta o durabilità non sempre adatti a ogni applicazione.
L’attuazione magnetica affronta il problema in modo diverso. Il campo magnetico attraversa il corpo del componente e permette di trasferire energia senza collegamenti fisici diretti. Questo può essere utile per dispositivi sigillati, strumenti medicali miniaturizzati, robot morbidi per manipolazione delicata e sistemi in cui tubi e cablaggi sarebbero scomodi.
La stampa 3D come strumento per programmare il movimento
La parte più interessante non è solo il materiale, ma il modo in cui geometria, rigidezza e magnetizzazione vengono combinate. I ricercatori hanno usato la scala di energia del laser, variata tra 1,0 e 3,0, per controllare sia la risposta meccanica sia quella magnetica del composito. Secondo l’abstract dello studio, la resistenza a trazione aumenta da 0,28 MPa a 0,99 MPa, mantenendo un allungamento a rottura tra 30% e 45%.
Questo significa che la stampa non serve soltanto a creare una forma. Il processo modifica anche le proprietà locali del materiale. Una zona può essere progettata per essere più rigida, un’altra per piegarsi più facilmente, un’altra ancora per funzionare come cerniera flessibile.
Il paper cita la realizzazione di cerniere flessionali da 0,5 mm di spessore, capaci di piegarsi e ripiegarsi sotto campi magnetici moderati senza danni osservati nelle condizioni di prova. Questo dettaglio è importante: nella robotica morbida, il movimento utile nasce spesso da piccole zone di deformazione controllata, non da grandi snodi meccanici tradizionali.
Due architetture: un attuatore allungato e uno espandibile
Il lavoro presenta due famiglie principali di attuatori. La prima è un attuatore allungato, ispirato a una fibra muscolare, capace di contrarsi in direzione lineare. La seconda è un attuatore espandibile, progettato per aprirsi e chiudersi in modo reversibile, così da afferrare o ancorarsi a un oggetto.
L’attuatore allungato pesa 1,57 grammi e, una volta magnetizzato nello stato contratto, riesce a produrre contrazione lineare sotto un campo di 500 mT. Nelle prove riportate, è riuscito a sollevare 50 grammi, pari a circa 32 volte il proprio peso, mantenendo la funzionalità per almeno 50 cicli.
L’attuatore espandibile, invece, lavora con un campo di 300 mT e può aprirsi e chiudersi per afferrare oggetti diversi, tra cui bacche morbide e geometrie rigide stampate in 3D. Lo stesso tipo di struttura può anche ancorarsi all’interno di un tubo mentre sostiene carichi sospesi da 50 grammi.
Strisciare senza gambe rigide
Uno degli esempi più chiari riguarda il robot strisciante. I ricercatori hanno combinato l’attuatore magnetico con piedi a frizione anisotropa, cioè superfici che oppongono resistenza diversa a seconda della direzione del movimento. Questo principio è simile a quello usato da alcuni organismi o micro-robot: una parte del corpo scivola in una direzione, ma fa più presa nell’altra.
Quando il campo magnetico provoca la contrazione e il rilascio dell’attuatore, la differenza di attrito permette al robot di avanzare. Secondo l’abstract, il sistema ha raggiunto fino al 100% di successo nella locomozione su substrati testurizzati.
Il dato non va letto come una promessa di robot già pronti per il mercato. Indica però che il meccanismo funziona in condizioni sperimentali e che la combinazione tra materiale magnetico, geometria flessibile e superficie di contatto può produrre movimento direzionale.
Una logica simile ai muscoli, ma con materiali stampati
Il termine “ispirato ai muscoli” non significa che il materiale replichi il muscolo biologico. Il parallelo riguarda il comportamento: contrazione, rilascio, deformazione distribuita e capacità di generare lavoro meccanico in un corpo morbido.
In un muscolo naturale, fibre, tendini e tessuti connettivi lavorano insieme. In questi attuatori, il ruolo è diviso tra geometria stampata, rigidezza locale e magnetizzazione programmata. La geometria funziona come una sorta di scheletro elastico; la magnetizzazione, invece, definisce come il corpo risponderà al campo.
Questa impostazione permette di progettare il movimento prima della produzione. Cambiando forma, spessore delle cerniere, direzione di magnetizzazione e campo applicato, si possono ottenere comportamenti diversi usando la stessa famiglia di materiali.
Il vantaggio di un componente monolitico
Molti robot morbidi richiedono assemblaggi complessi: camere pneumatiche, membrane, valvole, tubi, connessioni, parti rigide e sensori separati. In questo studio, invece, l’obiettivo è creare attuatori monolitici, cioè componenti stampati come un unico corpo funzionale.
Questo può ridurre il numero di parti, semplificare l’assemblaggio e limitare i punti di guasto. Per applicazioni di laboratorio, manipolazione delicata o dispositivi medicali, avere meno connessioni può essere un vantaggio pratico.
La stampa 3D LPBF consente inoltre di realizzare geometrie complesse e regioni con proprietà diverse senza ricorrere necessariamente a più materiali o a più passaggi di assemblaggio. Un lavoro precedente sullo stesso tema aveva già mostrato che la variazione locale dei parametri laser può modificare la rigidezza di compositi magneto-attivi in un intervallo da 2 a 22 MPa.
Perché usare LPBF invece di tecniche più comuni per elastomeri
Quando si parla di elastomeri e robotica morbida, molte persone pensano a colata in stampo, DIW, SLA/DLP con resine flessibili o FFF con filamenti morbidi. Tutte queste tecniche hanno un ruolo, ma ciascuna presenta limiti.
La Direct Ink Writing può stampare inchiostri caricati con particelle magnetiche, ma spesso ha produttività limitata e richiede un controllo fine della viscosità. Le tecnologie SLA/DLP possono offrire buona risoluzione, ma le particelle magnetiche possono assorbire o disperdere la luce, rendendo più complessa la polimerizzazione. La FFF con filamenti flessibili è accessibile, ma l’aggiunta di cariche magnetiche può rendere il materiale più difficile da estrudere e ridurre le prestazioni elastiche.
Il paper del 2026 usa invece LPBF su composito TPU/NdFeB. Questo approccio permette di lavorare con cariche magnetiche elevate e con controllo locale del processo. Il lavoro precedente del gruppo ricordava che nelle resine fotopolimeriche le particelle magnetiche possono limitare trasmissività ottica e viscosità, mentre la LPBF di compositi polimero-metallo può arrivare a frazioni di riempitivo magnetico molto più alte.
Applicazioni possibili
Le applicazioni più immediate sono nella robotica morbida da laboratorio: piccoli robot striscianti, pinze morbide, dispositivi per manipolare oggetti fragili, sistemi di ancoraggio e componenti capaci di muoversi in ambienti confinati.
Il paper cita anche possibili impieghi nella manipolazione minimamente invasiva di strumenti biomedicali. L’idea è comprensibile: un attuatore magnetico può essere controllato senza fili e senza tubi, caratteristica interessante per dispositivi che devono muoversi in spazi stretti o sigillati.
Un’altra area riguarda i dispositivi indossabili e assistivi. Materiali morbidi, deformabili e azionabili da remoto potrebbero servire in supporti leggeri, piccoli meccanismi di presa o interfacce adattive. Per arrivare a questi usi servono però prove su sicurezza, durata, biocompatibilità, magnetizzazione, sterilizzazione e compatibilità con campi magnetici esterni.
I limiti ancora da affrontare
Il risultato è interessante, ma non elimina diversi problemi pratici. Il primo riguarda l’hardware magnetico. Per muovere questi attuatori servono campi magnetici controllati, generati da magneti permanenti o bobine. Questo può rendere il sistema meno portatile, soprattutto se servono campi intensi o gradienti precisi.
Il secondo limite riguarda la distanza. La forza magnetica cala rapidamente quando aumenta la distanza tra sorgente del campo e attuatore. Questo rende più semplice lavorare con piccoli dispositivi vicini al magnete, mentre diventa più complesso scalare il sistema verso oggetti più grandi o più lontani.
Il terzo limite riguarda il materiale. Aumentare il contenuto di particelle magnetiche migliora la risposta al campo, ma può rendere il composito più rigido, più fragile o più difficile da processare. Nella robotica morbida serve un compromesso: abbastanza magnetismo per muovere il pezzo, abbastanza elasticità per deformarsi senza rompersi.
Una piattaforma più che un singolo prototipo
Il valore dello studio sta nel fatto che non presenta soltanto un oggetto dimostrativo. Propone una piattaforma di progettazione: stesso materiale di base, stesso processo additivo, più geometrie e più modalità di movimento.
Questo può essere utile per chi sviluppa robot morbidi perché permette di immaginare librerie di celle, cerniere, moduli di contrazione, pinze e segmenti striscianti. Cambiando dimensioni e magnetizzazione, lo stesso linguaggio progettuale può essere adattato a più compiti.
In futuro, i software CAD e di simulazione potrebbero includere non solo forma e materiale, ma anche vettori di magnetizzazione. In quel caso, il progettista non disegnerebbe solo “com’è fatto” il pezzo, ma anche “come deve muoversi” quando entra in un campo magnetico.
Una ricerca ancora da trasferire fuori dal laboratorio
Per ora il lavoro va considerato una ricerca scientifica, non un prodotto commerciale. Non ci sono indicazioni di aziende pronte a vendere questi attuatori, né specifiche industriali su costo, velocità di produzione, tolleranze su larga scala o durata su migliaia di cicli.
Il passo successivo sarà capire quanto il metodo sia ripetibile, quali geometrie possano essere prodotte con affidabilità, come si comporti il materiale dopo molti cicli e quale tipo di sistema magnetico sia adatto a un uso pratico. Per applicazioni medicali o indossabili serviranno anche prove specifiche su sicurezza e compatibilità.
Resta però un punto chiaro: la stampa 3D può diventare uno strumento per produrre robot morbidi non solo nella forma, ma anche nella funzione. In questo caso, il pezzo stampato incorpora elasticità, risposta magnetica e comportamento programmato, riducendo la dipendenza da tubi, cablaggi e assemblaggi complessi.
Mini scheda tecnica per WordPress
| Voce | Dato |
|---|---|
| Tema | Attuatori magnetici morbidi stampati in 3D |
| Titolo del paper | Muscle-inspired magnetic actuators that push, pull, crawl, and grasp |
| Data pubblicazione arXiv | 20 aprile 2026 |
| Autori | Muhammad Bilal Khan, Florian Hofmann, Kilian Schäfer, Matthias Lutzi, Oliver Gutfleisch |
| Istituzione | Technical University of Darmstadt |
| Strutture citate | Functional Materials, Institute of Materials Science; Additive Manufacturing Center |
| Processo produttivo | Laser Powder Bed Fusion, LPBF |
| Materiale | TPU/MQP-S composito |
| Fase magnetica | Particelle Nd₂Fe₁₄B |
| Funzioni dimostrate | Contrazione, sollevamento, strisciamento, presa, ancoraggio |
| Campo per attuatore allungato | 500 mT |
| Campo per attuatore espandibile | 300 mT |
| Peso attuatore allungato | 1,57 g |
| Carico sollevato | 50 g |
| Rapporto carico/peso | Circa 32 volte il peso proprio |
| Cicli testati | Almeno 50 |
| Spessore cerniere flessibili | 0,5 mm |
| Possibili applicazioni | Robotica morbida, pinze delicate, dispositivi biomedicali, strumenti miniaturizzati |
Tabella: attuatori tradizionali e attuatori magnetici stampati in 3D
| Aspetto | Pneumatici / idraulici | Magnetici stampati in 3D |
|---|---|---|
| Alimentazione | Aria, fluido, pompe, tubi | Campo magnetico esterno |
| Connessioni | Richiedono tubi o raccordi | Possono funzionare senza collegamenti fisici diretti |
| Integrazione | Spesso più componenti assemblati | Possibile componente monolitico |
| Miniaturizzazione | Limitata da tubi e valvole | Più adatta ad ambienti confinati |
| Controllo | Pressione e valvole | Intensità, direzione e gradiente del campo |
| Limite principale | Ingombro del sistema di alimentazione | Necessità di magneti o bobine controllate |
Tabella: movimenti dimostrati
| Movimento | Come viene ottenuto | Possibile uso |
|---|---|---|
| Contrazione | Attuatore allungato magnetizzato nello stato contratto | Muscoli artificiali, trazione, sollevamento |
| Sollevamento | Contrazione sotto campo da 500 mT | Piccoli meccanismi di presa o azionamento |
| Strisciamento | Contrazione + piedi con attrito anisotropo | Robot morbidi su superfici testurizzate |
| Presa | Attuatore espandibile che apre e chiude | Manipolazione di oggetti fragili |
| Ancoraggio | Espansione dentro un tubo | Strumenti per ambienti confinati o biomedicali |
Tabella: vantaggi e limiti pratici
| Punto | Vantaggio | Limite |
|---|---|---|
| Stampa 3D LPBF | Geometrie complesse e proprietà locali programmabili | Processo più specialistico rispetto a FFF o SLA desktop |
| Materiale TPU/NdFeB | Combina elasticità e risposta magnetica | Troppe particelle possono ridurre deformabilità |
| Attuazione magnetica | Controllo senza fili o tubi | Richiede campo magnetico esterno |
| Componente monolitico | Meno assemblaggi e meno giunzioni | La progettazione richiede simulazione e magnetizzazione controllata |
| Robotica morbida | Interazione più sicura con oggetti delicati | Prestazioni ancora da validare in ambienti reali |
| Applicazioni biomedicali | Potenziale per strumenti miniaturizzati e sigillati | Servono prove su sicurezza, biocompatibilità e sterilizzazione |