La stampa 3D multimateriale sta aprendo una strada interessante nella progettazione di materiali morbidi per robotica, sensori tattili, interfacce aptiche e modelli medicali. Il nuovo lavoro scientifico i-Tac: Inverse Design of 3D-Printed Tactile Elastomers with Scalable and Tunable Optical and Mechanical Properties affronta un problema molto pratico: come ottenere un elastomero stampato in 3D che abbia allo stesso tempo una certa morbidezza e una certa trasparenza, senza passare attraverso una lunga sequenza di prove, errori, nuove miscele e nuovi campioni.
Il lavoro è firmato da Wen Fan e Dandan Zhang, del Department of Bioengineering dell’Imperial College London, ed è stato depositato su arXiv il 12 aprile 2026; la scheda arXiv indica anche l’accettazione su Advanced Intelligent Systems.
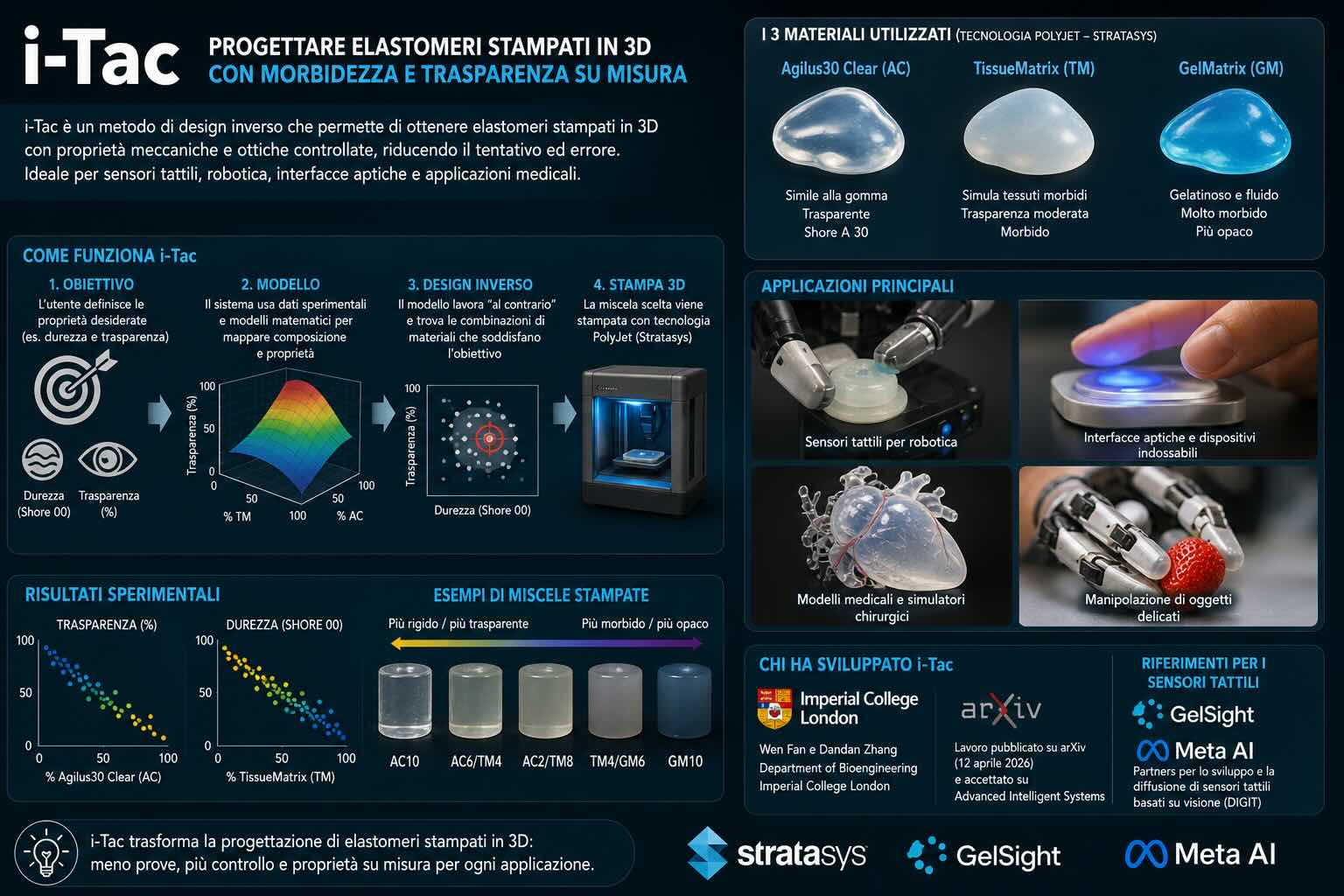
L’idea di fondo è semplice da spiegare, anche se la parte matematica è più articolata: invece di partire da una miscela di materiali e vedere che proprietà escono dalla stampante, i-Tac parte dall’obiettivo finale. Per esempio: voglio un elastomero con una data trasparenza e una determinata durezza Shore 00. Il sistema cerca allora la composizione più adatta tra tre materiali stampabili in PolyJet e propone una finestra di produzione compatibile con quei requisiti.
Il problema: gli elastomeri morbidi non sono tutti uguali
Gli elastomeri sono materiali centrali nei Vision-Based Tactile Sensors, spesso abbreviati in VBTS. Sono sensori tattili che usano una superficie morbida deformabile e una parte ottica interna, spesso composta da camera, illuminazione e algoritmi di visione. Quando un oggetto preme sulla superficie morbida, l’elastomero si deforma; questa deformazione viene letta visivamente e trasformata in informazioni sul contatto, sulla forza, sulla geometria dell’oggetto o sulla sua texture.
In questi sensori, l’elastomero non deve essere scelto solo perché “morbido”. Deve avere proprietà coerenti con il modo in cui il sensore lavora. Se è troppo rigido, può deformarsi poco e perdere sensibilità. Se è troppo morbido, può deformarsi troppo o recuperare lentamente. Se è troppo opaco, la parte ottica può non leggere bene ciò che accade all’interno. Se è troppo trasparente o troppo riflettente, può alterare il contrasto delle immagini. Per questo trasparenza e durezza diventano due parametri chiave.
Nella produzione tradizionale, molti elastomeri per sensori tattili vengono realizzati con silicone colato in stampi. È una tecnica diffusa, ma ha limiti evidenti: il risultato può dipendere da rapporto di miscelazione, temperatura, cura del materiale, bolle, tempi, stampo e mano dell’operatore. Il paper sottolinea che questo approccio porta spesso a un processo “forward”, cioè si prepara un materiale, lo si misura e poi si corregge la formulazione in più cicli successivi.
La stampa 3D può ridurre una parte di questo lavoro, ma non basta stampare un elastomero per risolvere il problema. Finora molte ricerche sulla stampa 3D di sensori tattili si sono concentrate soprattutto sulla geometria: spessori, forme, strutture interne, moduli di contatto. i-Tac sposta l’attenzione anche sulle proprietà del materiale stampato, cioè su come regolare in modo più prevedibile durezza e comportamento ottico.
Design inverso: partire dal risultato invece che dalla ricetta
Il concetto di design inverso è uno dei punti più interessanti del lavoro. Nel metodo classico, l’ingegnere sceglie una ricetta, stampa il campione, misura il risultato e poi modifica la ricetta. Nel design inverso, invece, si definisce prima il risultato desiderato e si usa un modello per cercare la combinazione di materiali che può produrlo.
Nel caso di i-Tac, il sistema usa esperimenti su miscele, modelli di superficie di risposta e funzioni di desiderabilità. Detto in modo più semplice: i ricercatori stampano e misurano una serie di campioni, costruiscono una mappa che collega composizione e proprietà, poi usano quella mappa al contrario. Se l’utente chiede un certo valore di trasparenza e durezza, il sistema individua una regione praticabile della mappa e propone una formulazione.
Questo non significa che la stampa diventi automatica in senso assoluto. Significa però che una parte del lavoro empirico viene trasformata in un processo più leggibile e ripetibile. Per laboratori di robotica, aziende che sviluppano interfacce tattili o produttori di dispositivi personalizzati, ridurre i cicli di prova può voler dire risparmiare tempo, materiale e lavoro manuale.
Il legame con la pelle umana
i-Tac prende ispirazione dalla struttura della pelle umana, in particolare dal derma. Il paper richiama la composizione del derma come sistema composito: fibre di collagene, fibre elastiche e sostanza fondamentale. Ogni componente contribuisce in modo diverso al comportamento meccanico della pelle. Le fibre di collagene danno rigidità, le fibre elastiche permettono deformazione e recupero, la componente fluida e viscoelastica contribuisce alla morbidezza e alla risposta al carico.
I ricercatori non cercano di copiare la pelle in modo biologico diretto. Usano piuttosto questa logica come modello progettuale: combinare materiali diversi, ciascuno con una funzione, per ottenere una gamma più ampia di proprietà rispetto a un singolo materiale stampato.
Per questo i-Tac utilizza tre materiali PolyJet di Stratasys: Agilus30 Clear, indicato come AC; TissueMatrix, indicato come TM; e GelMatrix, indicato come GM. Nel paper, Agilus30 Clear viene descritto come materiale simile alla gomma, con buona trasparenza e durezza Shore A 30; TissueMatrix come materiale più morbido, con comportamento simile ai tessuti e trasparenza moderata; GelMatrix come materiale gelatinoso e molto fluido.
Il ruolo di Stratasys e della tecnologia PolyJet
La scelta della tecnologia PolyJet è coerente con il tipo di problema. PolyJet è un processo di material jetting che deposita fotopolimeri liquidi e li polimerizza con luce UV, permettendo di combinare più materiali nello stesso oggetto. Stratasys descrive PolyJet come una tecnologia adatta a modelli multimateriale, parti con trasparenza, flessibilità, colori e combinazioni di materiali in una singola stampa.
Per i-Tac questo aspetto è decisivo: il sistema non lavora solo su una forma, ma su una miscela digitale. La stampante può assegnare materiali diversi in modo controllato, costruendo un elastomero che non è semplicemente “Agilus”, “TissueMatrix” o “GelMatrix”, ma una combinazione con proprietà intermedie.
Agilus30 è il materiale elastomerico più vicino al concetto di gomma flessibile: Stratasys lo presenta come fotopolimero PolyJet resistente a flessione e piegatura, con durezza Shore A 30 nella versione clear, white e black. TissueMatrix è pensato per modelli medicali morbidi e contrattivi, capaci di simulare tessuti organici e utilizzabili per training chirurgico, test di dispositivi medicali e modelli didattici. GelMatrix, invece, è orientato a modelli vascolari e tessuti morbidi, con consistenza gelatinosa e possibilità di essere rimosso da strutture interne complesse con getti d’acqua.
Questi tre materiali non sono stati sviluppati da Stratasys per i-Tac, ma il lavoro dei ricercatori mostra come possano essere usati in modo più sistematico per costruire elastomeri con proprietà target.
Come funziona il metodo sperimentale
Nel lavoro sono state selezionate 15 miscele principali tra AC, TM e GM, con percentuali diverse. I campioni includono miscele binarie, come AC/TM o TM/GM, e miscele ternarie con tutti e tre i materiali. Per la parte ottica sono stati prodotti 90 provini cilindrici, con diverso spessore, testati con uno spettrometro su un intervallo da ultravioletto a infrarosso; per la parte meccanica sono stati realizzati campioni più grandi, misurati con durometro Shore 00.
I risultati mostrano una gamma molto ampia. Le miscele AC/TM mantengono in genere un’elevata trasparenza, mentre le miscele con GM tendono a diventare più opache o più morbide. Alcuni valori indicati nella tabella del paper sono utili per capire l’estensione del controllo: AC10 ha una trasparenza corretta dell’83,06% e durezza Shore 00 pari a 84,8; AC2/TM8 scende a Shore 00 43,2 con trasparenza del 79,56%; TM4/GM6 arriva a Shore 00 19,2 con trasparenza del 39,19%.
Il punto non è scegliere una miscela “migliore” in assoluto. Il punto è costruire una mappa. Alcune applicazioni potrebbero richiedere un elastomero molto trasparente e abbastanza rigido; altre un materiale più morbido e meno trasparente; altre ancora un compromesso tra i due parametri. i-Tac serve a navigare questo spazio senza procedere alla cieca.
Perché trasparenza e durezza vanno progettate insieme
Nei sensori tattili basati su visione, trasparenza e durezza non sono proprietà separate. La trasparenza influenza la qualità dell’immagine interna; la durezza influenza la deformazione. Se il materiale è morbido ma non consente una lettura ottica efficace, il sensore può perdere precisione. Se è otticamente valido ma troppo rigido, può rispondere male a contatti deboli.
È qui che il design inverso diventa utile. Un progettista potrebbe indicare un obiettivo di durezza e trasparenza, e il sistema potrebbe restituire non una formula unica, ma una finestra operativa: quali combinazioni di AC, TM e GM sono più vicine a quell’obiettivo, quali sono stampabili e quali rischiano di uscire dallo spazio di proprietà disponibile.
Il paper mostra che la durezza è predetta con errori abbastanza contenuti, in genere tra il 2% e il 10% per i materiali analizzati. La trasparenza è più difficile da predire nelle formulazioni più opache: nei casi simili a DragonSkin l’errore risulta più alto, tra il 25% e il 43%. Questo dato è importante perché evita una lettura troppo ottimistica: i-Tac funziona bene su molte aree dello spazio di progetto, ma la zona opaca richiede ancora un modello più raffinato.
Dal campione al sensore completo
Il lavoro non si ferma ai provini. I ricercatori hanno usato i-Tac anche per produrre moduli di contatto completi per sensori tattili, includendo pelle, marcatori, lenti e parti elastomeriche. Per la validazione sono stati presi come riferimento sensori noti nel settore, tra cui GelSight, DIGIT e un sensore custom interno chiamato ViTacTip.
Qui entrano in gioco aziende e piattaforme già conosciute nella robotica tattile. GelSight è una società specializzata in tecnologia di tactile imaging e sensori tattili digitali. Il sensore DIGIT è stato reso disponibile commercialmente attraverso una partnership tra GelSight e Meta AI, con l’obiettivo di rendere più accessibile la ricerca sul tatto robotico.
Questa parte è rilevante perché i-Tac non viene presentato solo come un esercizio sui materiali. Viene collocato dentro un settore reale: la costruzione di sensori tattili per robot, mani robotiche, pinze intelligenti, manipolazione di oggetti delicati e sistemi in cui la visione da sola non basta.
Robotica, aptica e prodotti morbidi
Le applicazioni più immediate riguardano la robotica. Un robot che deve afferrare una fragola, un tessuto, un cavo, una guarnizione o un componente deformabile ha bisogno di informazioni tattili. Le telecamere esterne vedono l’oggetto, ma non sempre capiscono pressione, scivolamento, microgeometria o punto di contatto. Un sensore tattile con elastomero progettato correttamente può dare al robot una lettura più ricca dell’interazione fisica.
C’è poi il campo delle interfacce aptiche. Pulsanti morbidi, superfici touch, dispositivi wearable, manopole, grip e comandi medicali potrebbero trarre vantaggio da materiali in cui il “feeling” non viene lasciato alla sola prova manuale. Per un prodotto consumer, il tatto è parte dell’esperienza: una superficie può sembrare economica, rigida, appiccicosa, piacevole o sicura a seconda della risposta meccanica e della finitura ottica.
Nel medicale, la possibilità di controllare morbidezza e trasparenza può avere valore nella produzione di modelli anatomici, simulatori chirurgici e dispositivi di training. Stratasys posiziona TissueMatrix e GelMatrix proprio in ambiti legati a modelli di tessuti, vasi sanguigni, organi e test di dispositivi medicali.
Un passaggio dalla geometria al materiale programmabile
Per anni la stampa 3D è stata raccontata soprattutto come libertà geometrica: forme complesse, canali interni, reticoli, alleggerimenti. i-Tac lavora su un livello diverso: la libertà non riguarda solo la forma, ma anche la risposta del materiale.
Questo è un passaggio importante. In molti casi, il progettista non vuole solo “un pezzo morbido”. Vuole un pezzo che abbia un certo modulo, un certo recupero elastico, una determinata trasparenza, una certa risposta alla pressione e una certa compatibilità con il sistema ottico. La stampa 3D multimateriale consente di costruire queste differenze in modo digitale, ma serve un modello per sapere come combinare i materiali.
i-Tac prova a fornire proprio questo modello. Non sostituisce la caratterizzazione sperimentale, ma la organizza. Non elimina del tutto l’incertezza, ma riduce l’area del tentativo casuale. Non promette un materiale universale, ma offre un metodo per progettare elastomeri in modo più mirato.
Il ruolo dell’Imperial College London
Il lavoro si inserisce nelle attività del gruppo di Dandan Zhang all’Imperial College London. Zhang è indicata dall’ateneo come Assistant Professor in AI & Machine Learning nel Department of Bioengineering, Lecturer in Medical Robotics e direttrice del Multi-Scale Embodied Intelligence Laboratory. I suoi interessi uniscono robotica, biomedicina e intelligenza artificiale.
Wen Fan, PhD student presso I-X e il Department of Bioengineering, lavora sulla robotica tattile nel laboratorio guidato da Dandan Zhang. In un profilo pubblicato da Imperial I-X, Fan descrive il suo progetto come focalizzato sui Vision-Based Tactile Sensors e sulla manifattura monolitica tramite stampa 3D multimateriale.
Questa continuità spiega perché i-Tac non sia un lavoro isolato. È parte di una linea di ricerca più ampia su sensori tattili stampati in 3D, robotica morbida e sistemi in cui percezione fisica e intelligenza artificiale devono lavorare insieme.
Limiti e prossimi passi
Il lavoro è promettente, ma va letto con attenzione. Il sistema è stato validato su una famiglia specifica di materiali PolyJet e su proprietà ben definite: trasparenza e durezza. Altri parametri, come isteresi, invecchiamento, resistenza a fatica, stabilità nel tempo, assorbimento, temperatura, usura superficiale e biocompatibilità in contesti clinici, richiedono valutazioni dedicate.
Gli stessi autori indicano che il framework può essere esteso ad altri materiali PolyJet e anche ad altre tecnologie multimateriale, come la stampa DIW, ridefinendo lo spazio delle miscele e ricostruendo i modelli con nuovi dati sperimentali.
Questo è forse il punto più concreto per l’industria: i-Tac non è solo una ricetta per tre resine. È un metodo. In futuro potrebbe essere applicato a nuove famiglie di elastomeri, materiali biocompatibili, formulazioni più robuste, superfici tattili per dispositivi indossabili o sensori integrati in mani robotiche.
Cosa significa per la stampa 3D
Il valore di i-Tac sta nel portare la stampa 3D multimateriale più vicino a una progettazione funzionale del materiale. Non basta più chiedere alla stampante di fare una forma complessa. La domanda diventa: quale combinazione di materiali serve per ottenere una funzione precisa?
Nel caso dei sensori tattili, questa funzione è duplice: vedere attraverso o dentro l’elastomero e farlo deformare nel modo corretto. Per robotica, interfacce aptiche, medicale e prodotti morbidi personalizzati, questa combinazione può diventare un elemento di progetto importante.
Con i-Tac, Imperial College London, Stratasys, GelSight e Meta AI entrano nel discorso da ruoli diversi: i ricercatori sviluppano il metodo, Stratasys fornisce l’ecosistema PolyJet e i materiali usati nello studio, GelSight e Meta AI rappresentano un riferimento industriale e commerciale per i sensori tattili basati su visione. Il risultato è una ricerca che mostra come la stampa 3D possa evolvere da strumento di prototipazione a piattaforma per progettare materiali morbidi con proprietà più controllabili.
Per il settore additive manufacturing, il messaggio è chiaro: il futuro dei materiali stampati in 3D non dipenderà solo da nuove resine o nuove macchine, ma anche da strumenti capaci di collegare proprietà desiderate, formulazioni, processo e validazione sperimentale. i-Tac va in questa direzione, con un’applicazione molto concreta: dare ai sensori tattili una pelle stampata in 3D più adatta al compito che devono svolgere.